

Human body target tracking method based on progressive unscented Kalman filtering
An unscented Kalman and human target technology, applied in the field of mobile robots, can solve the problems of poor stability and low precision, achieve the effects of reducing linearization error, improving tracking accuracy, and ensuring computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings.
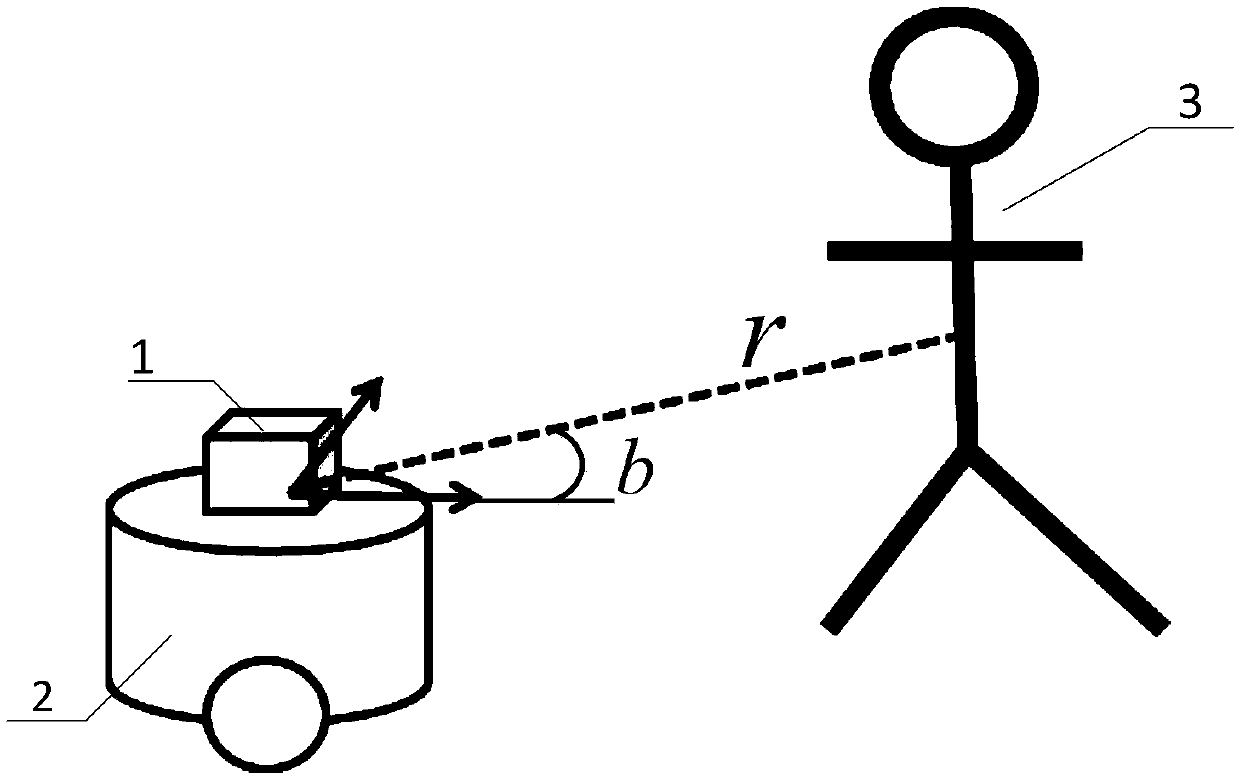
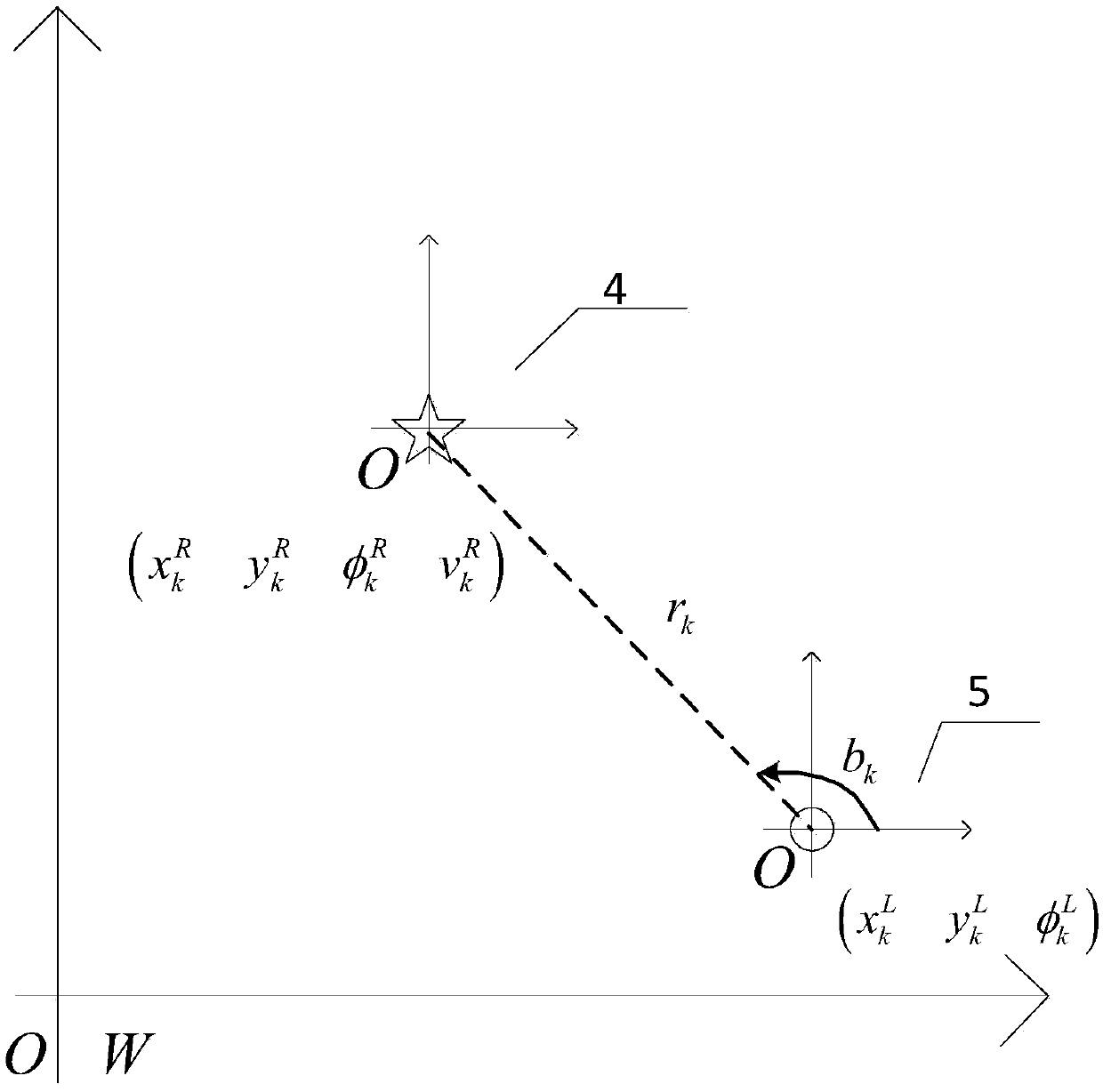
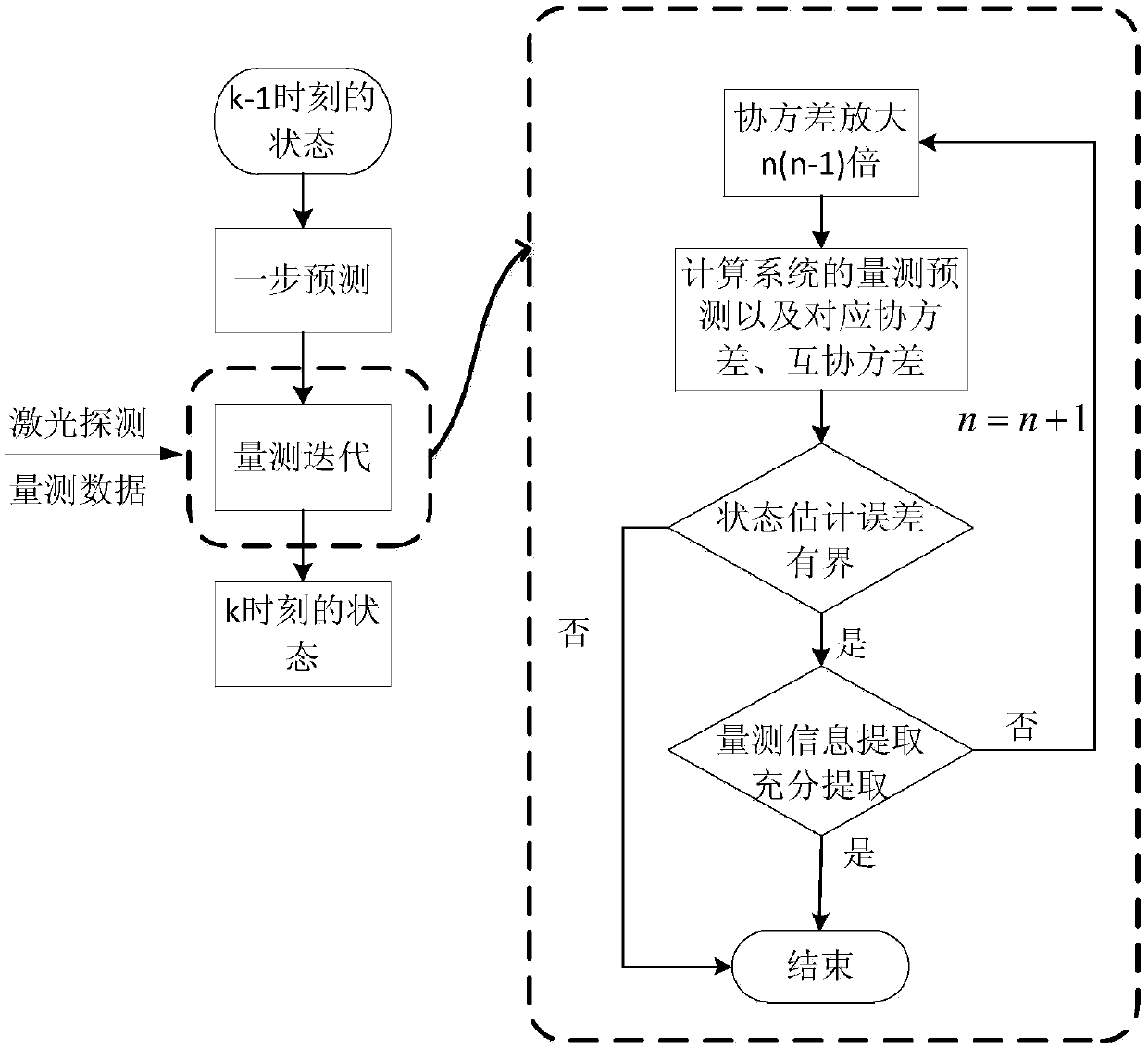
[0021] refer to Figure 1 ~ Figure 3 , a human target tracking method based on progressive unscented Kalman filter, by figure 1 As shown in , the following robot uses a laser sensor to detect the human target, and obtains the distance and angle between the service robot and the human target; figure 2 As shown, according to the measurement information returned by the laser sensor, the positional relationship between the robot and the human target in the global coordinates is obtained through coordinate conversion. The state space model of the follower system is shown in formula (1), and the sensor measurement model is shown in formula ( 2) as shown:
[0022]
[0023]
[0024]
[0025]
[0026] Among them, the state vector of the system is and are the positions of the human target on the x-axis and y-axis at time k, respectively, and is the vel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More