

Multi-freedom degree pitching device
A ball-throwing device and a technology of degrees of freedom, applied in the field of intelligent robots, can solve the problems of increasing the practicability and flexibility of the manipulator, and achieve the effect of wide working area, low manufacturing cost and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
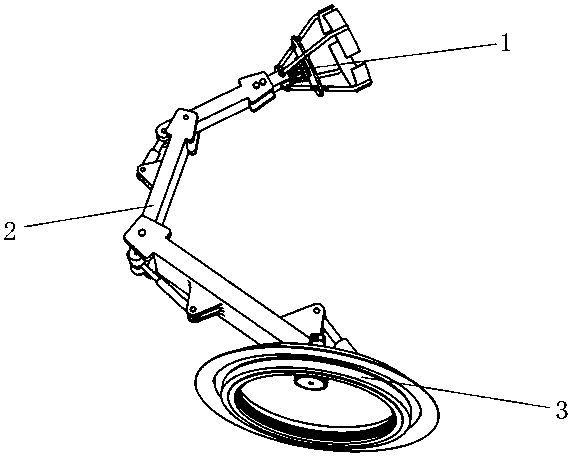
[0027] Embodiment 1: as Figure 1-11 As shown, the multi-degree-of-freedom pitching device includes a throwing port 1, a multi-axis mechanical arm 2, and a bottom rotation mechanism 3. The ball throwing port 1 is installed on the upper end of the multi-axis robotic arm 2, and the bottom rotation mechanism 3 is installed on the multi-axis mechanical arm The lower end of the arm 2; the throwing port 1 includes a push plate 4, a pusher 5, 4 cladding plates 6, and 4 guide rods 7, wherein the pusher 5 includes a shaft coupling 8, a push rod 9, a lead screw 10, Motor 11, support base 12, one end of guide rod 7 is connected to the middle part of support base 12 through a pin, cladding plate 6 is fixed on the other end of guide rod 7, four cladding plates 6 form a ring structure, and push plate 4 is fixed on the push rod 9 and is located between the four guide rods, and moves along the guide rods; the motor 11 is arranged in the support seat 12, the output shaft of the motor 11 is con...
Embodiment 2
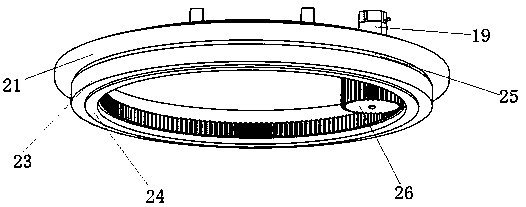
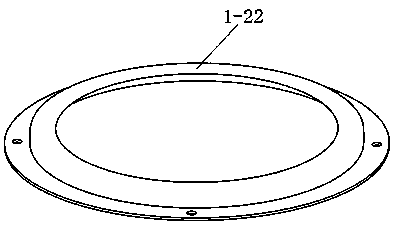
[0028] Embodiment 2: The structure of this device is the same as that of Embodiment 1, the difference is that there is a motor installation groove 20 on the support seat 12, and the motor 11 is installed in the motor installation groove 20; There are 4 guide rod mounting grooves 28, and an axle 29 is arranged in the guide rod installing groove 28, and the axle is arranged in the guide groove 27 and moves along it ( Figure 5 , 7 ).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More