

Two-section flexible operation arm
A two-stage, manipulator technology, applied in the field of flexible manipulators, can solve the problems of limited range of motion, poor flexibility, cumbersomeness, etc., and achieve the effect of large range of motion, strong environmental adaptability, and flexible motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and through specific embodiments.
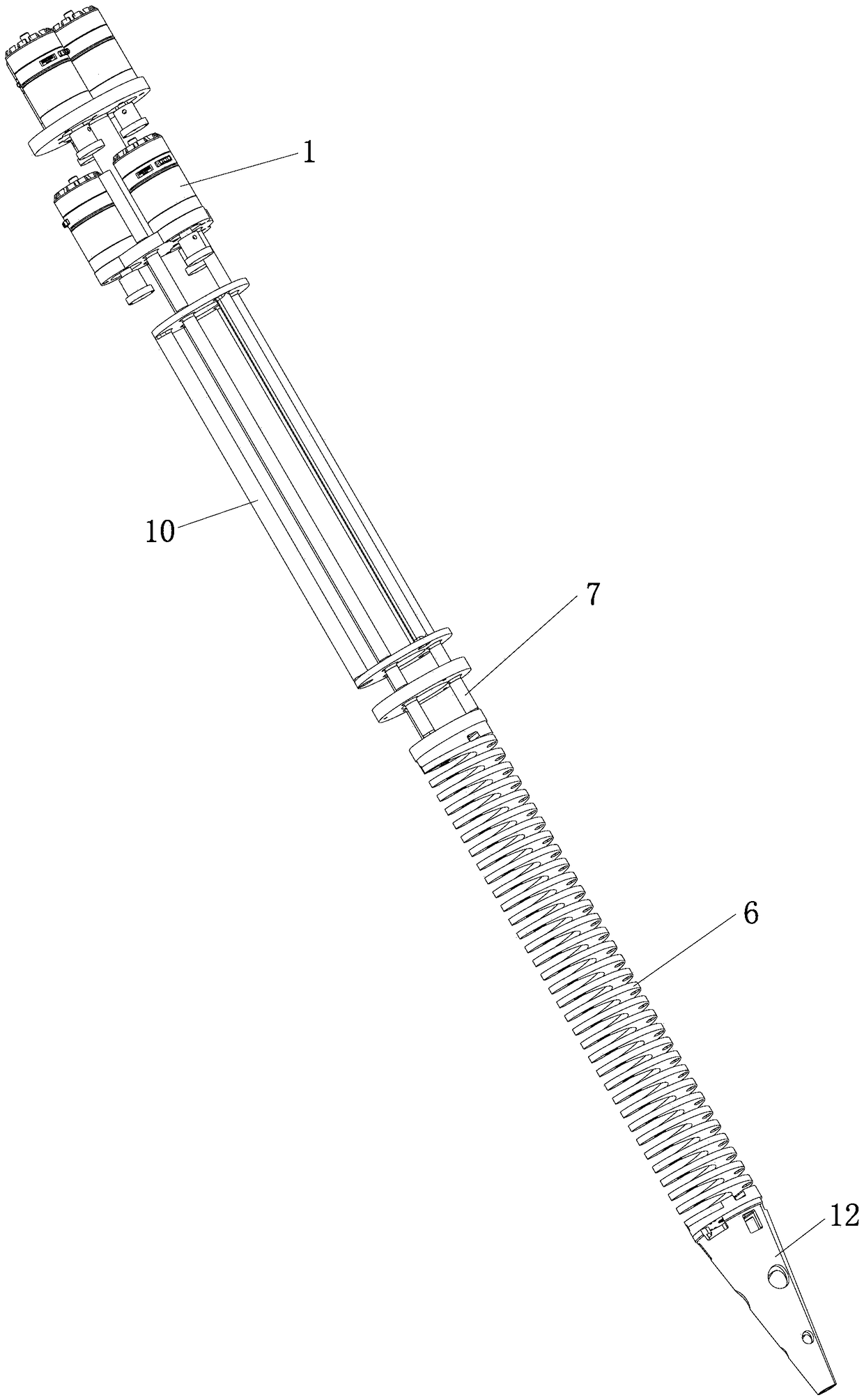
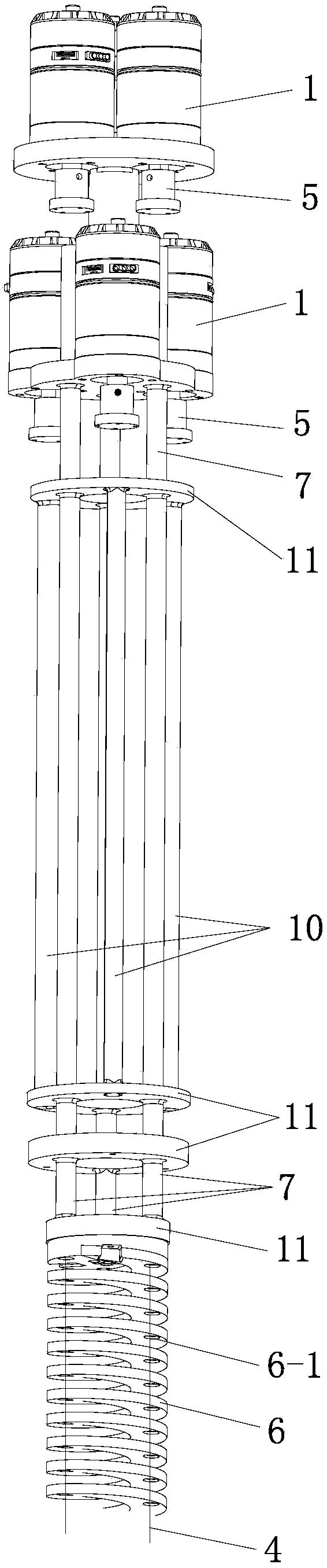
[0023] A two-section flexible operating arm, which includes two sets of power sources, a power source conjoined fixing frame 3, a first section of flexible arm 6 and a second section of flexible arm 8;
[0024] Two groups of power sources are arranged on the power source conjoined fixing frame 3, each group of power sources includes three motors 1, and the three motors 1 are evenly arranged, and the output end of each motor 1 is fixedly equipped with a connection plate 5,
[0025] The first section flexible arm 6 is a helical spring, and one end of the first section flexible arm 6 is connected with the fixed frame of the power source, and the other end of the first section flexible arm 6 is connected with an end of the second section flexible arm 8, and the second section The flexible arm 8 is an elastic telescopic flexible arm; three g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More