

Amphibious bionics robot
A bionic robot and amphibious technology, applied in the field of robotics, can solve problems such as poor stability, complex systems, and redundant mechanisms, and achieve the effects of good concealment, flexible movement, and improved adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
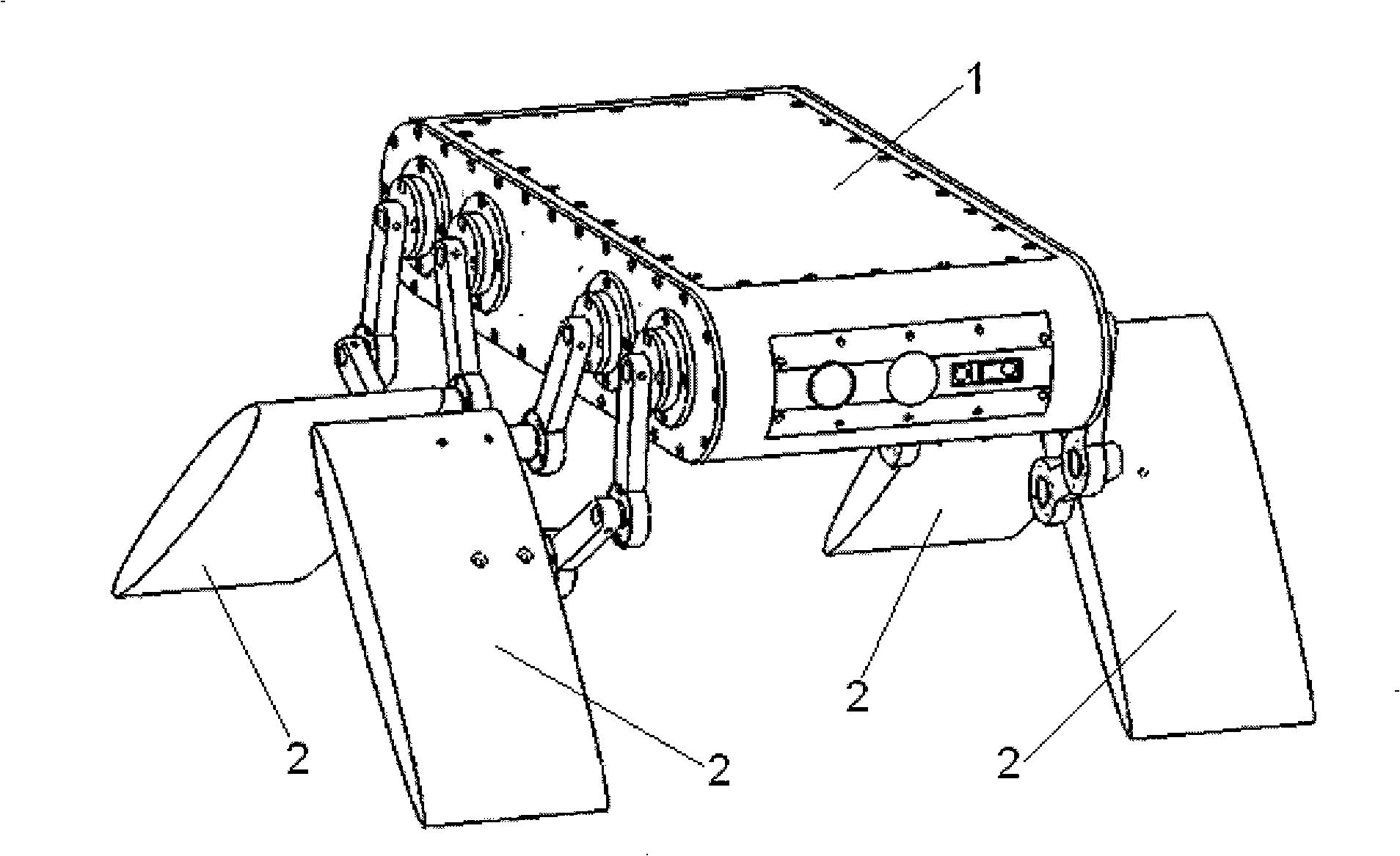
[0022] Such as figure 1 As shown, the present invention includes a sealed main cabin body 1 and four paddle leg compound propulsion mechanisms 2 .
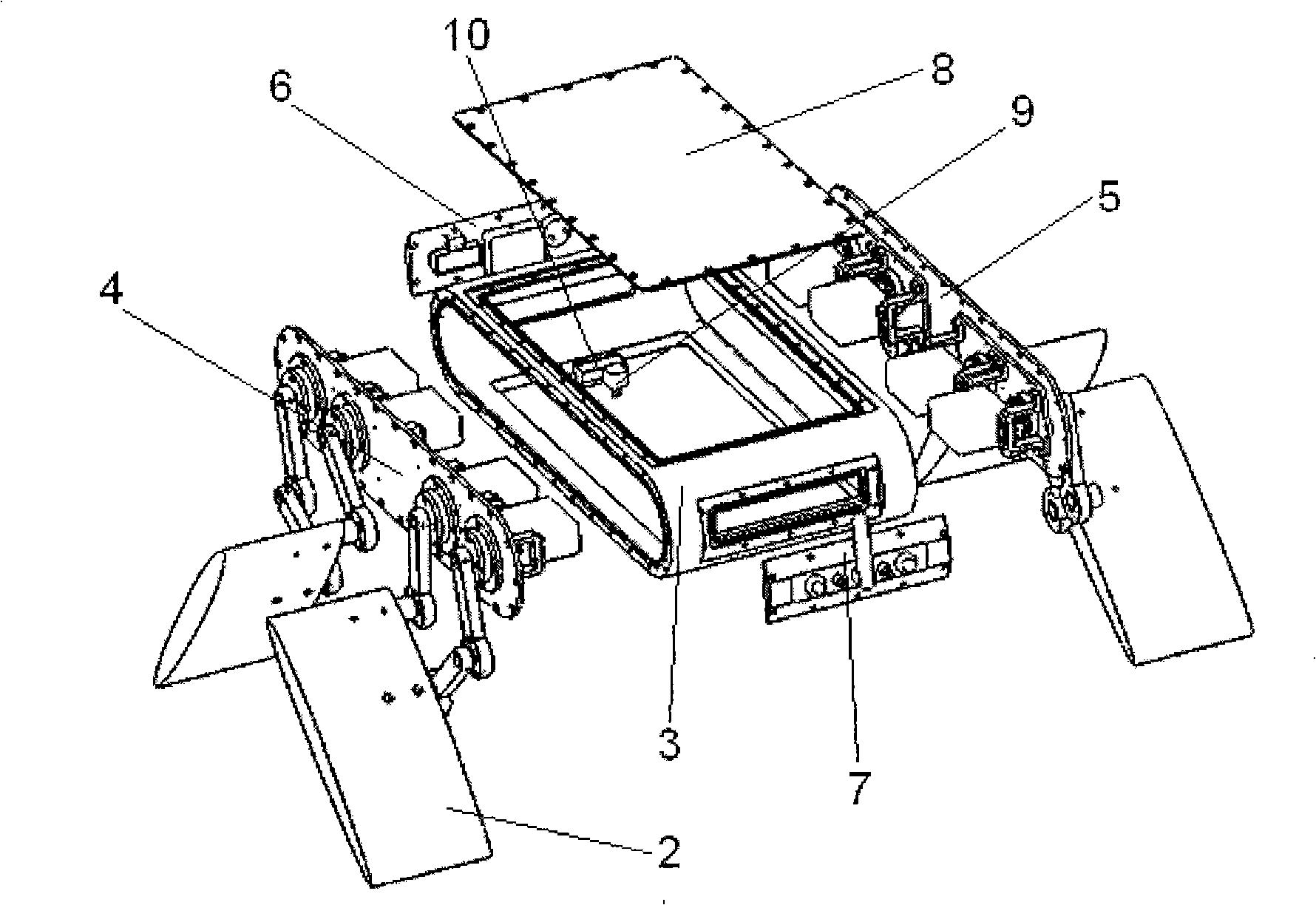
[0023] Such as figure 2 As shown, the main cabin body 1 of the present invention includes a shell 3. In order to reduce the fluid resistance when the present invention swims, the front and rear ends of the shell 3 are arc-shaped. Windows are provided on the left and right sides, the front and rear ends and the upper part of the housing 3, and two left and right side covers 4, 5 corresponding to the shapes are respectively arranged on the windows on the left and right sides of the housing 3, and four paddles The leg compound propulsion mechanism 2 is arranged on the left and right side covers 4,5 opposite in pairs and symmetrically. Two front and rear end covers 6, 7 corresponding to the shape are arra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More