

Deformable all-terrain adaptable robot walking mechanism
A walking mechanism and robot technology, applied in the field of robotics, can solve problems such as long production cycle, track jamming, loss of hub or track, etc., and achieve high transmission efficiency, flexible movement, and fast speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
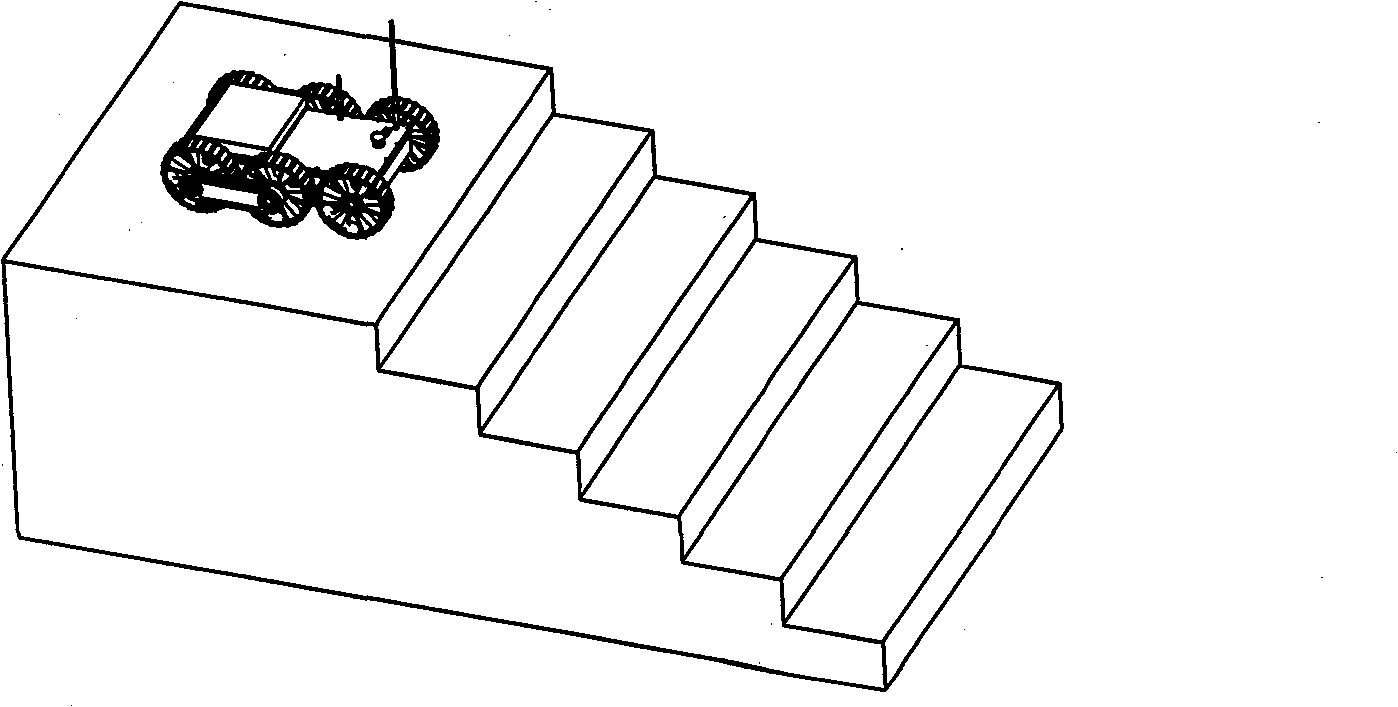
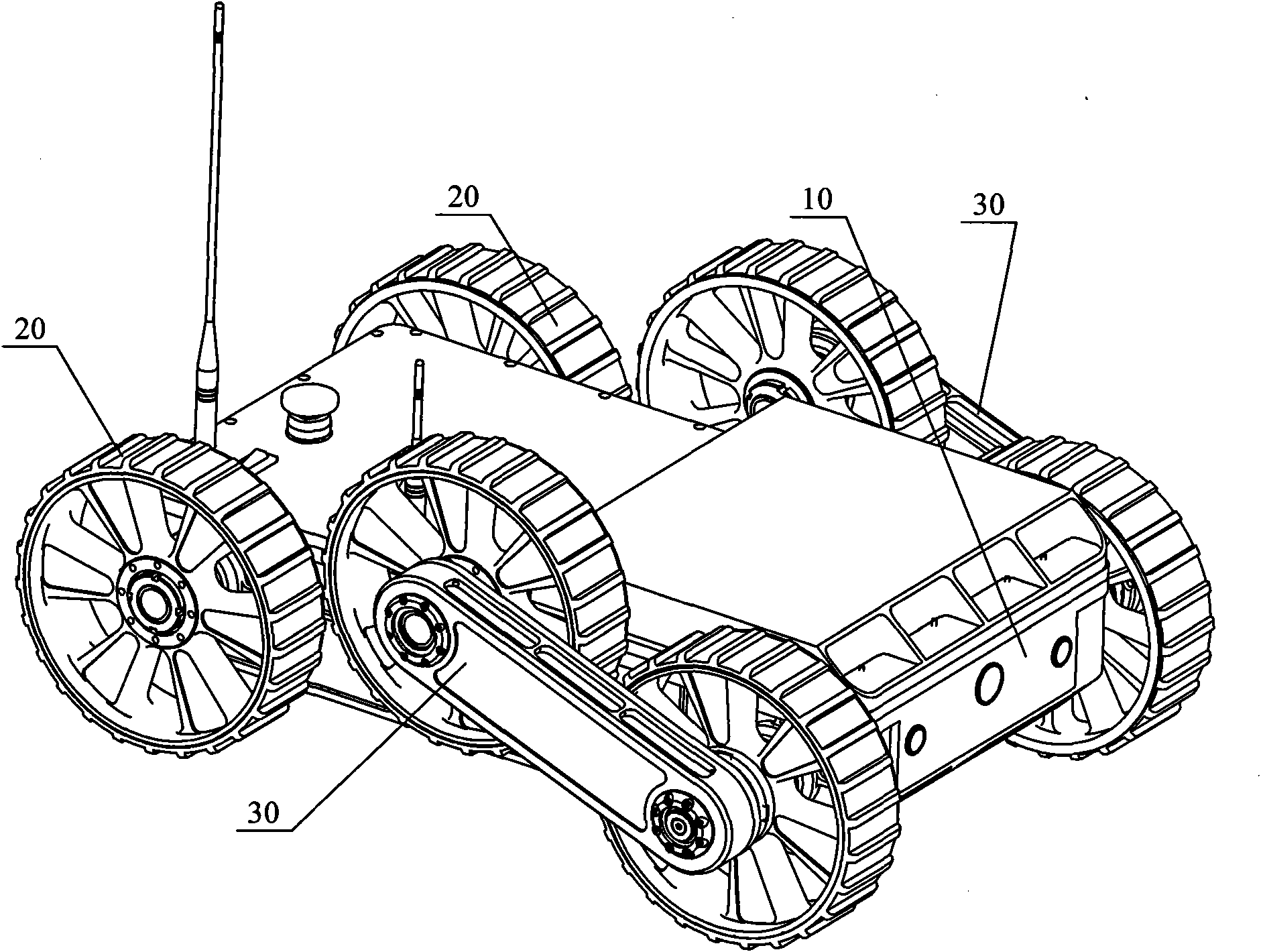
[0041] According to attached figure 1 , a robot walking mechanism deformable to adapt to all terrains, mainly composed of a frame 10, a wheel mechanism 20, an overturning arm mechanism 30 and the like.
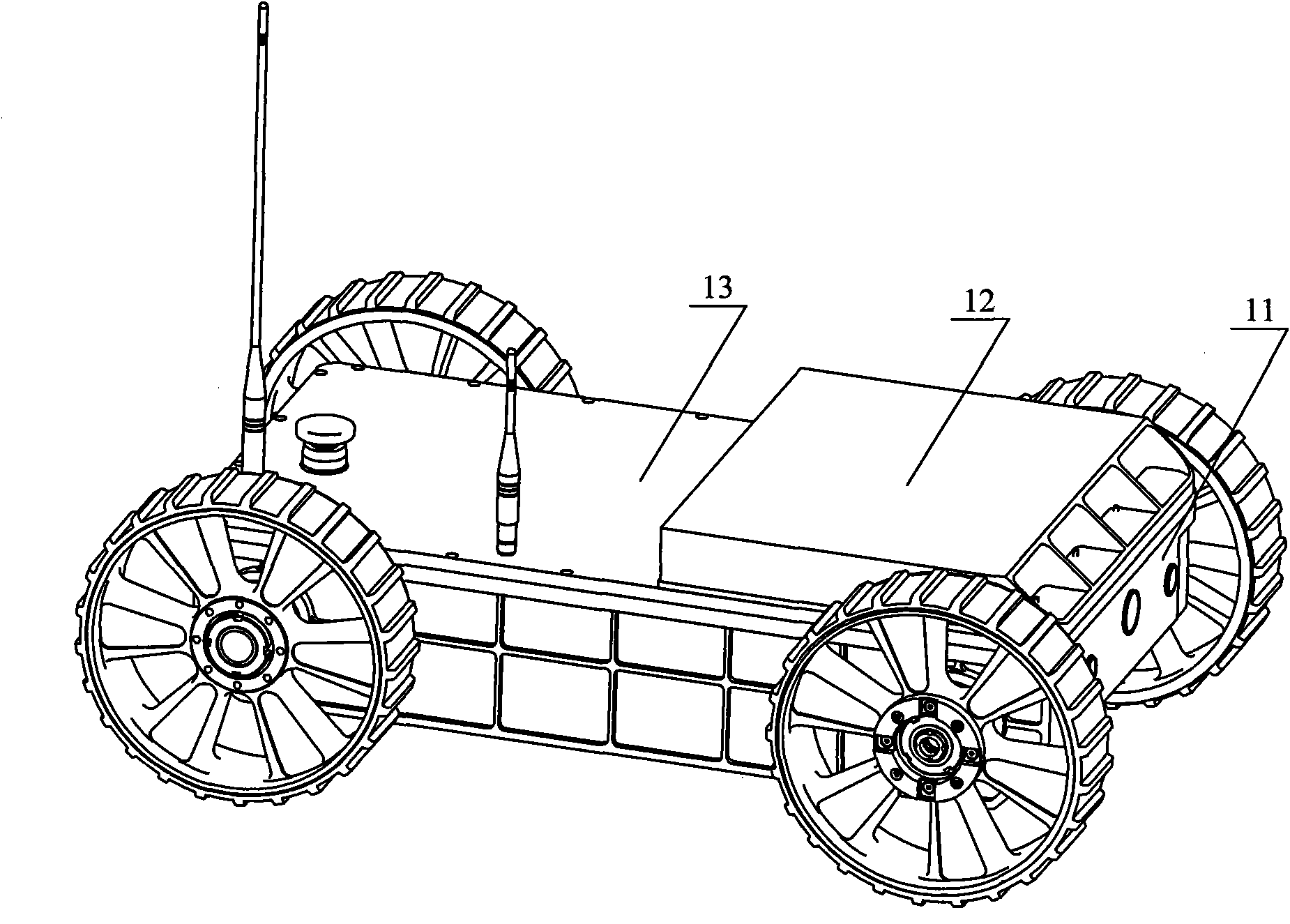
[0042] According to attached figure 2 , The frame 10 is mainly composed of a casing 11 , a power supply system 12 , and a case cover 13 .
[0043] The wheel mechanism 20 is divided into left and right parts, and the right wheel part is completely symmetrical with the left wheel part. According to attached image 3 , take the left wheel part as example, the left wheel part is mainly made up of driving wheel 22 (left front wheel), driven wheel 26 (left rear wheel) and driving and transmission mechanism.
[0044] The driving and transmission mechanism mainly includes the left front shaft assembly 21 (including output bevel gear, input synchronous pulley, front shaft, sealing ring, bearing gasket, etc.), motor assembly 23 (including driving motor, motor reducer, motor encoder,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More