

Robot stacking program generating method, storage medium and demonstrator
A program generation and robot technology, applied in the field of robot palletizing, can solve the problems that affect the effect of robot palletizing, complex and heavy workload, etc., and achieve the effects of improving safety, improving debugging efficiency, and being easy to use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
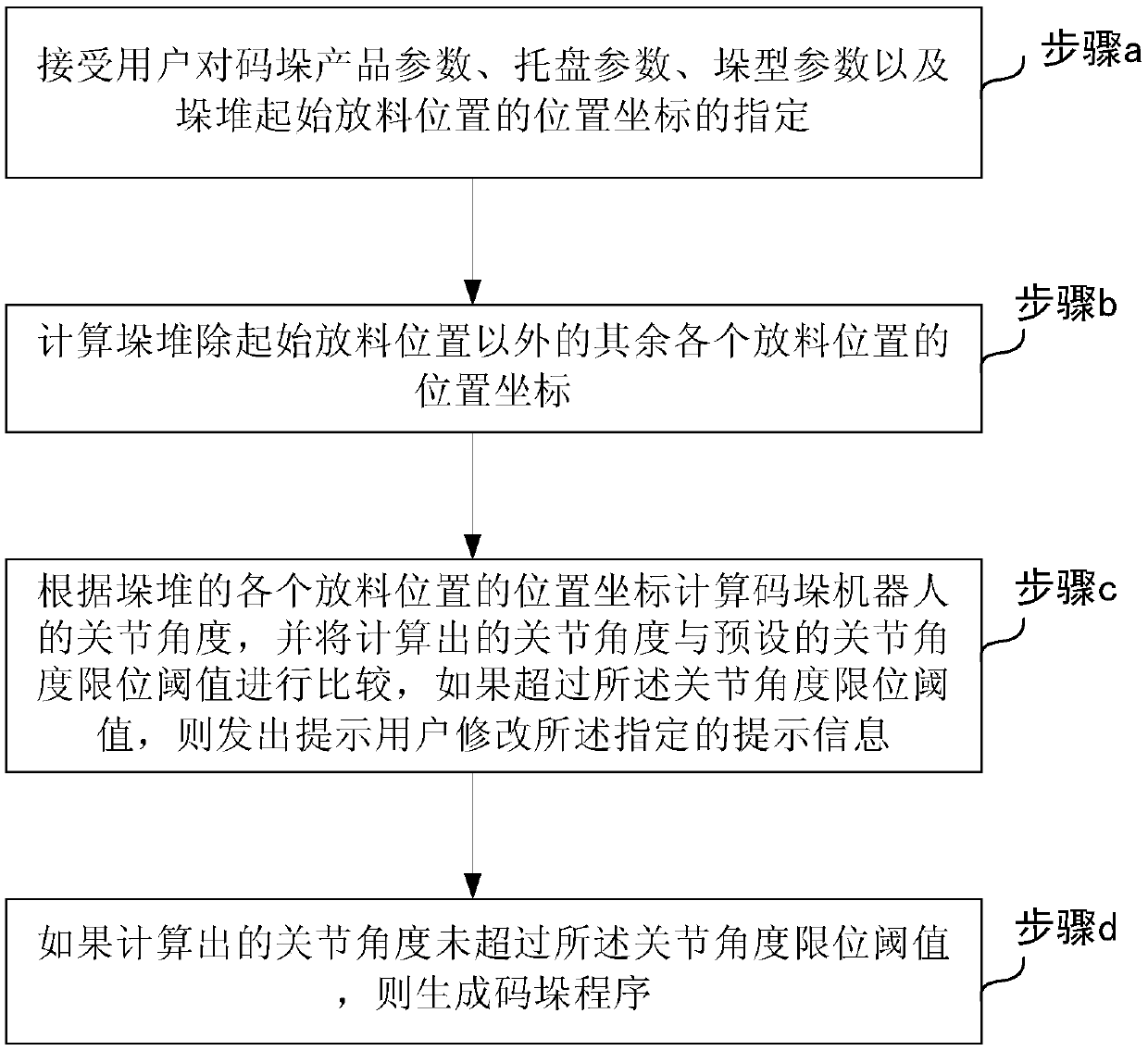
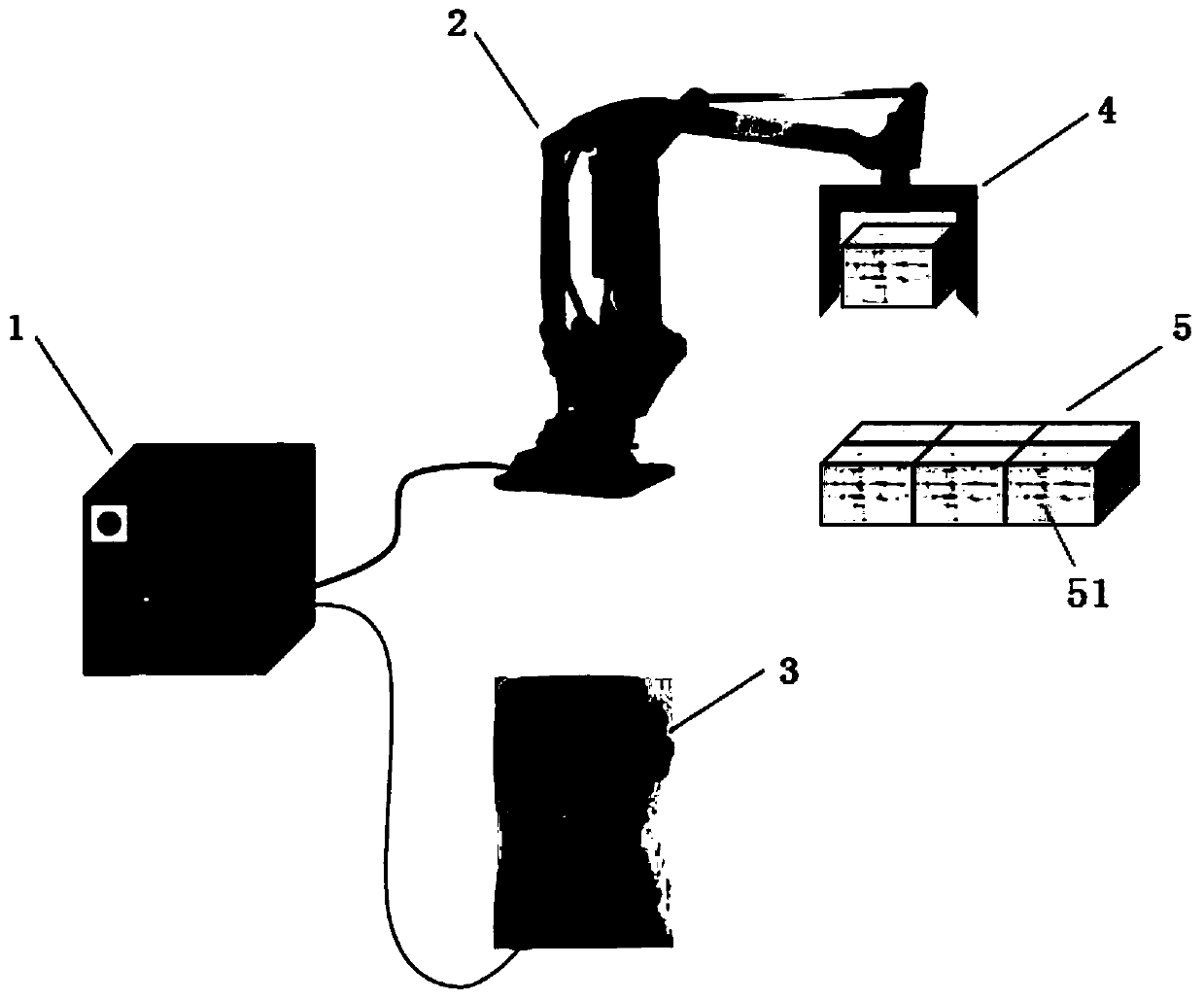
[0019] figure 1 A schematic flowchart of a method for generating a robot palletizing program according to an embodiment of the present invention is shown. see figure 1 and figure 2 , a method for generating a robot palletizing program according to an embodiment of the present invention, comprising the following steps:
[0020] Step a, accepting the user's designation of the palletizing product parameters, pallet parameters, stacking type parameters, and the position coordinates of the starting position of the stack;
[0021] Step b, calculating the position coordinates of each other discharging positions of the stack except the initial discharging position;
[0022] Step c, calculate the joint angle of the palletizing robot according to the position coordinates of each discharging position of the stack, and compare the calculated joint a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More