

Generative confrontation network-based method for writing calligraphy by robot
A robotic and generative technology, applied in the field of robotics, can solve a lot of human work and other problems, and achieve the effect of solving human manual input and good learning ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with drawings and embodiments.
[0024] Embodiments of the present invention include the following steps:
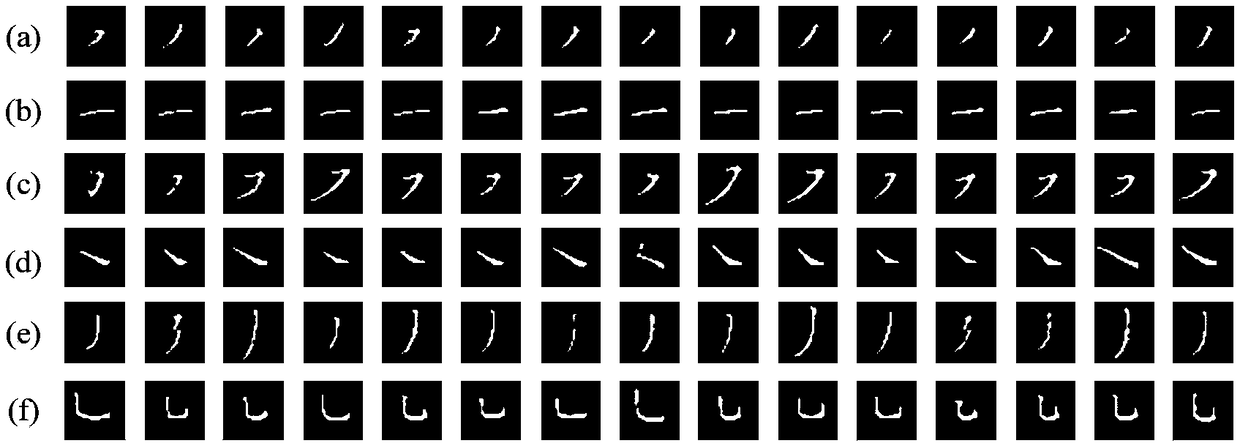
[0025] 1) Collect stroke data of standard brush characters, organize and classify them according to stroke type, and mark them.
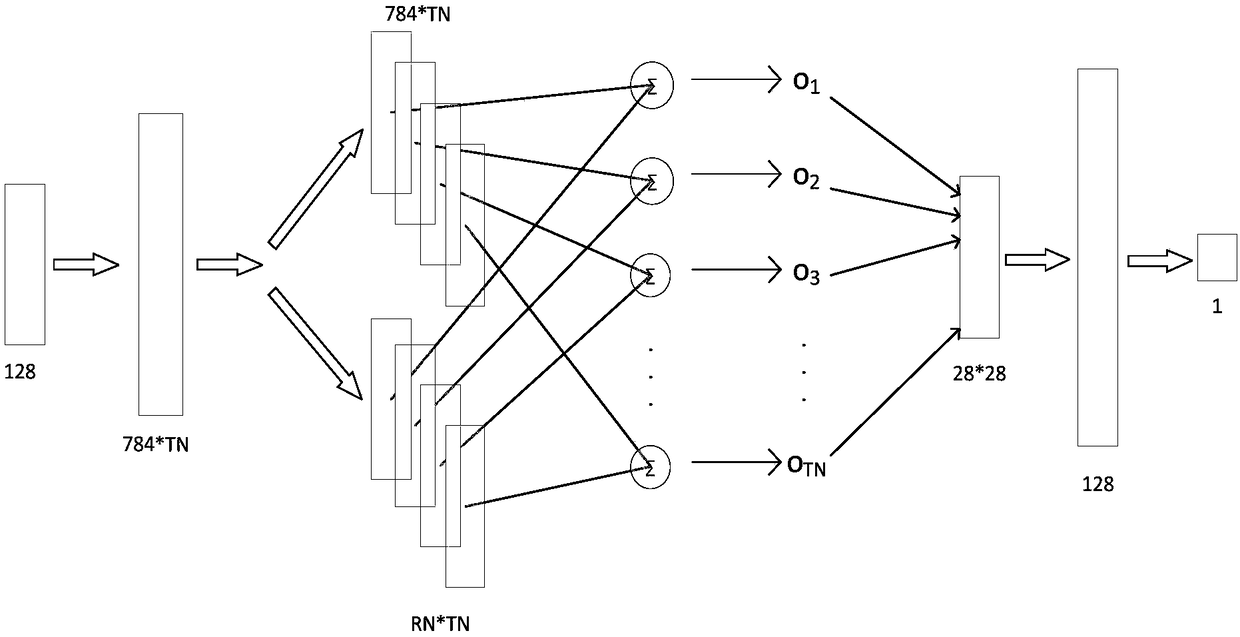
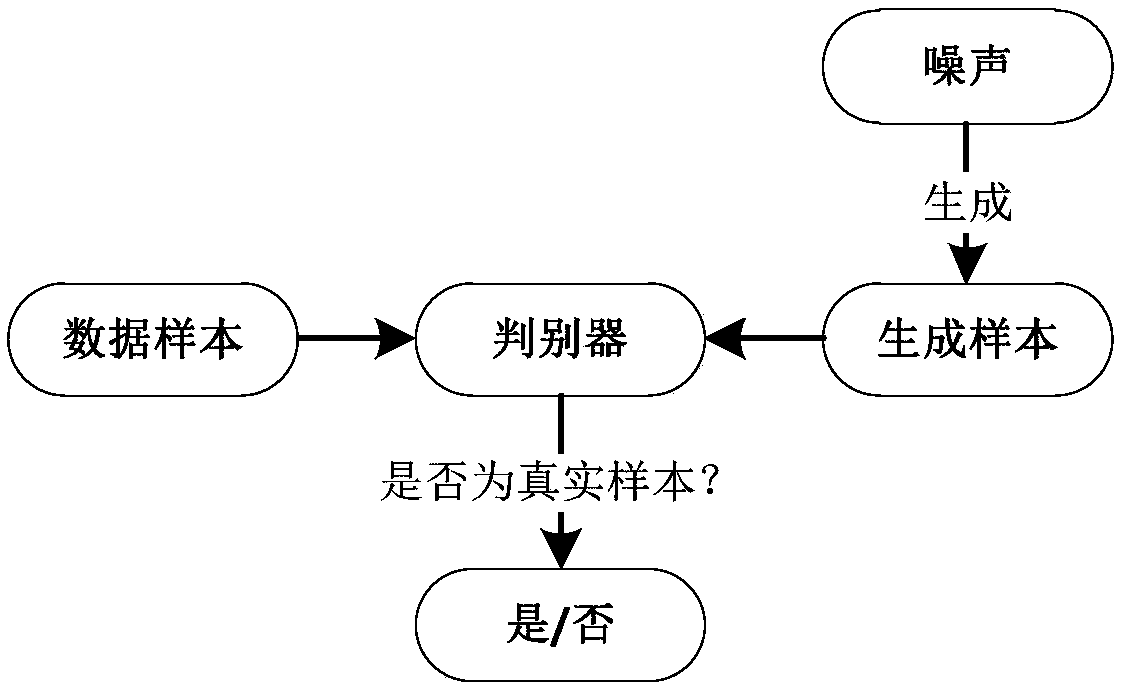
[0026] 2) Two deep neural networks are trained based on the generated confrontation network model, the generation network G and the confrontation network D.
[0027] 3) Input the randomly sampled vector into the generation network G to obtain the probability distribution of the stroke trajectory points.
[0028] 4) The calligraphy robot uses the sampling method to obtain the stroke position information from the probability distribution and writes the strokes to the drawing board. After writing, the camera captures and records the stroke image.
[0029] 5) Preprocess the image to be processed, input it into the confrontation network D in step 2) for training, and adju...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More