

Avoidance method for obstacles and physical limits
A technology of physical limits and obstacles, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of mechanical arm lockup and the limit of physical joints of redundant manipulators are not considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
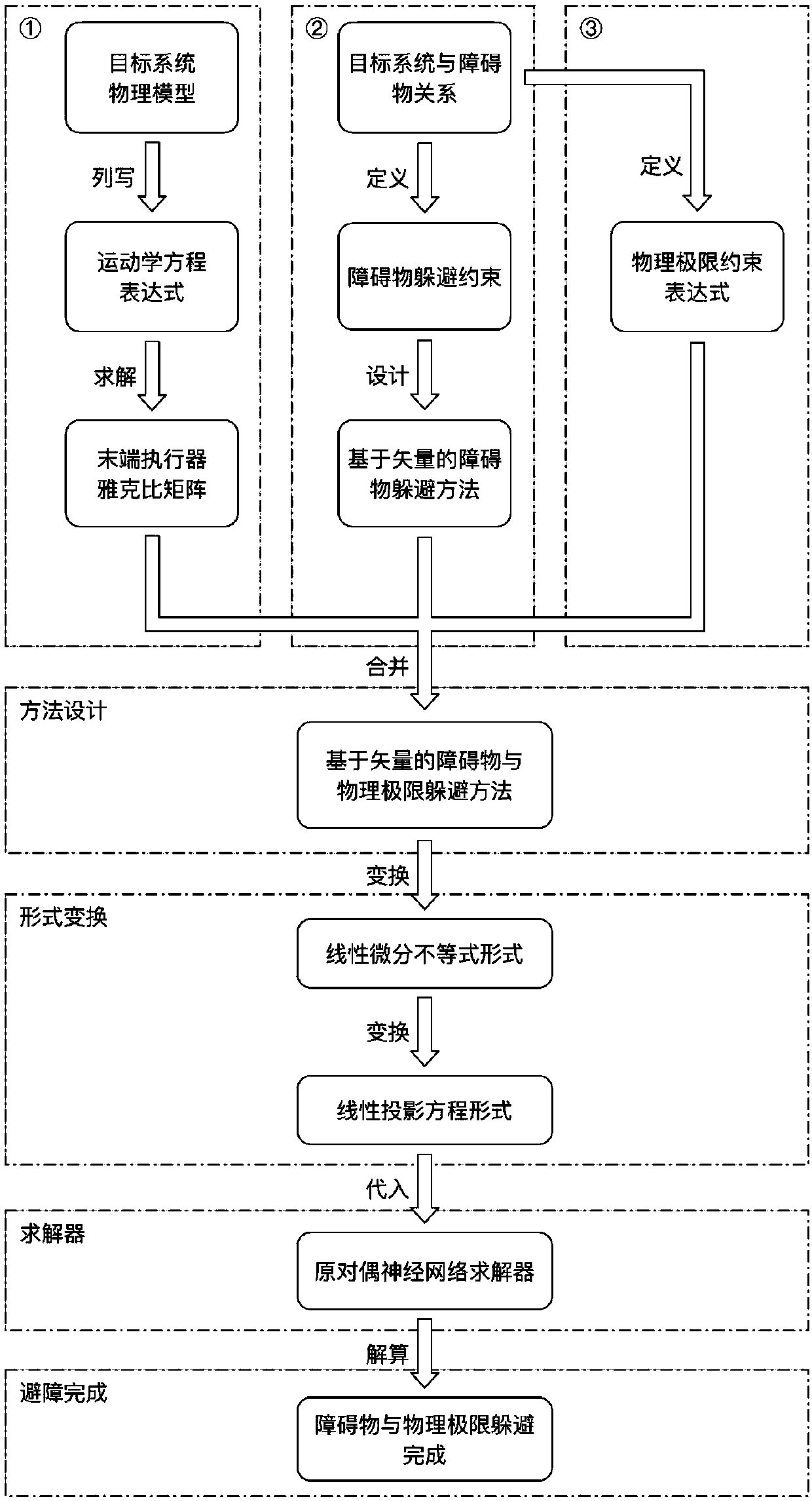
[0123] figure 1 Shown is the flow chart of the obstacle and physical limit avoidance method of the example of the present invention, this vector-based obstacle and physical limit avoidance method comprises the following steps:
[0124] S1. According to the physical model of the target system, write its kinematic equation expression;
[0125] S2. Based on the kinematic equation expression of the target system in step S1, solve the Jacobian matrix of the end effector of the target system;
[0126] S3. According to the relationship between the target system and the obstacle, define its obstacle avoidance constraint;
[0127] S4. Optimizing the obstacle avoidance constraints described in step S3, and designing a vector-based obstacle avoidance method;
[0128]S5. According to the physical model of the target system, set its physical limit constraint expression;
[0129] S6. Merge the vector-based obstacle avoidance method described in step S4 with the physical limit constraint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More