Flexible grasping device
A grasping device and flexible technology, applied in the field of grasping devices, can solve problems such as the destruction of flexible sensors, lack of embedded sensors, inability to optimize grasping strategies, etc., to achieve the effect of improving the success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Exemplary embodiments of the present invention are described below with reference to the accompanying drawings. It should be understood that these specific descriptions are only used to teach those skilled in the art how to implement the present invention, but are not intended to exhaust all possible ways of the present invention, nor are they intended to limit the scope of the present invention.
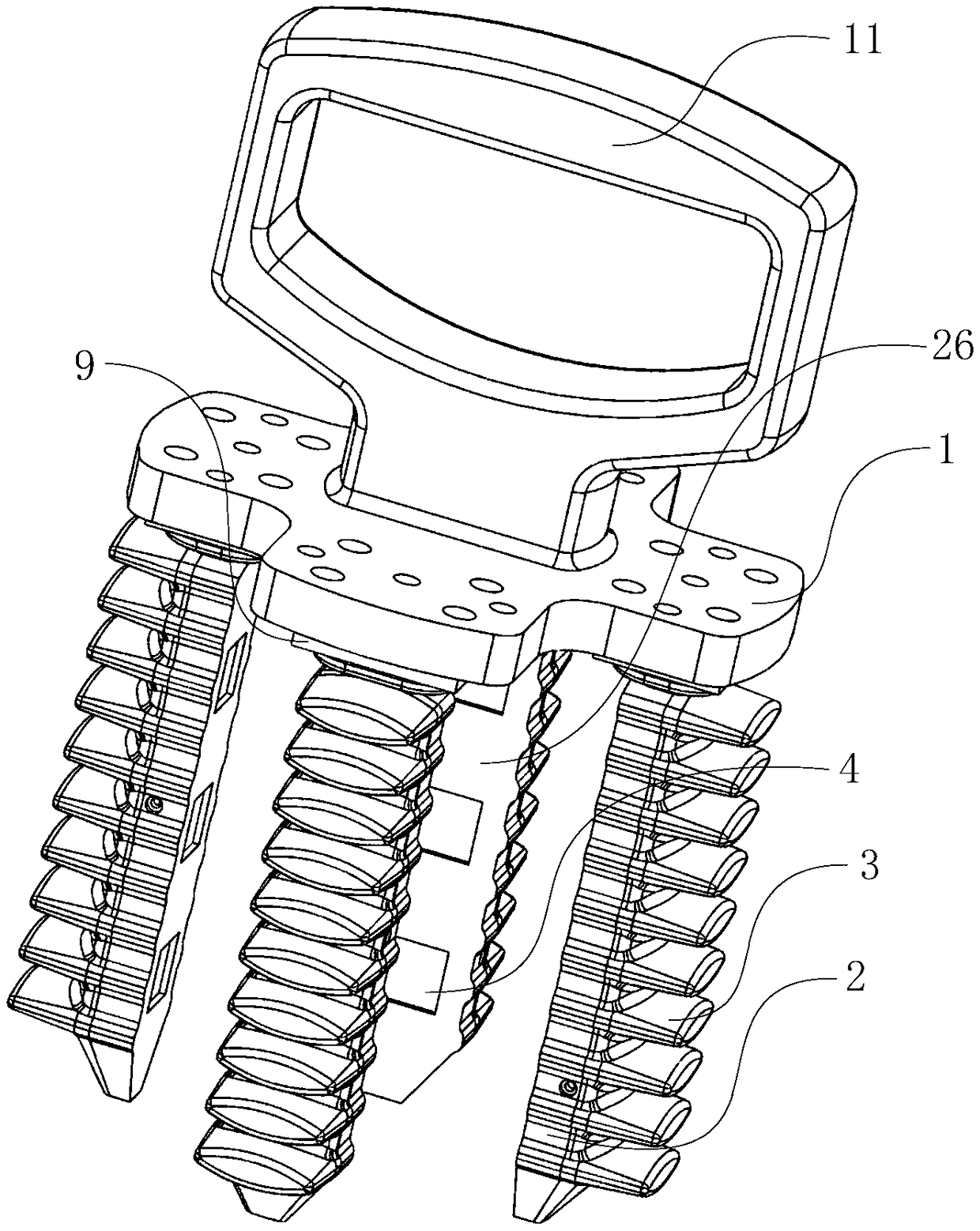
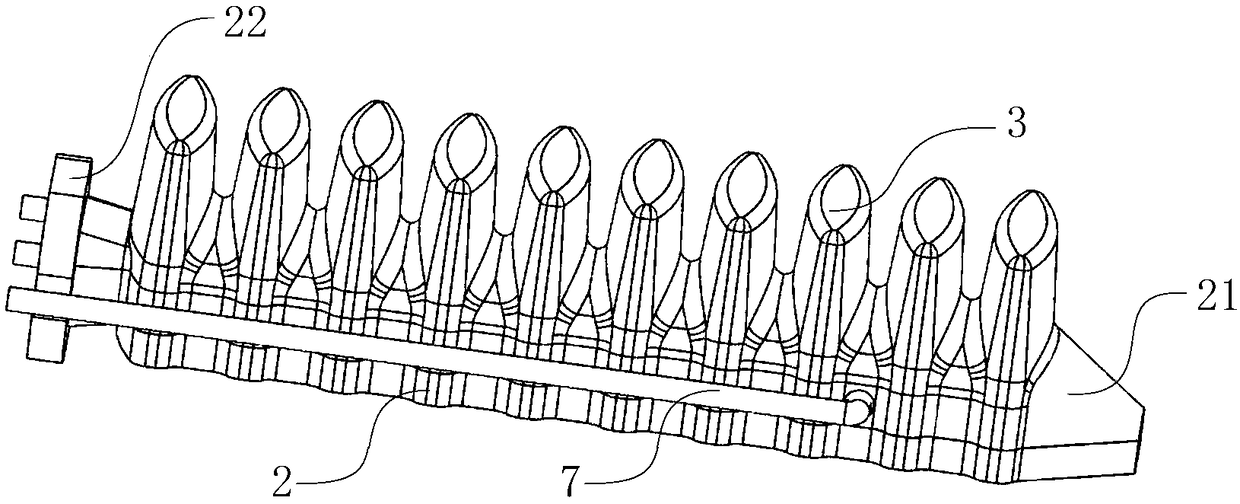
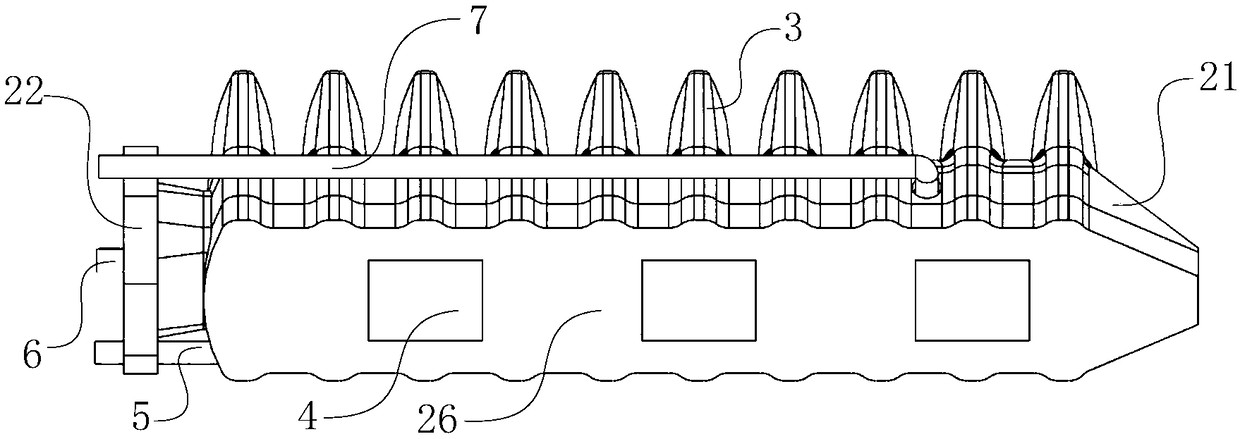
[0033] Such as figure 1 As shown, the flexible gripping device includes a base 1 and an arm 2 . Four arms 2 with the same structure are connected to the base body 1, and the flexible gripping device can grip objects similarly to fingers by bending the arms 2 .
[0034] The base body 1 is provided with a ring-shaped handle portion 11 , so that it is convenient to hold the flexible gripping device for hand-held operation. It should be understood that the shape of the handle portion 11 in the present invention is not limited thereto, and it can be any appropriate shape, as lon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com