

Robot foot end structure
A robot and foot end technology, applied in the field of machinery, can solve problems such as affecting the service life of the robot, affecting the work of the robot, and difficult unstructured road surfaces, and achieves the effects of simple structure, increased contact range, and easy maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
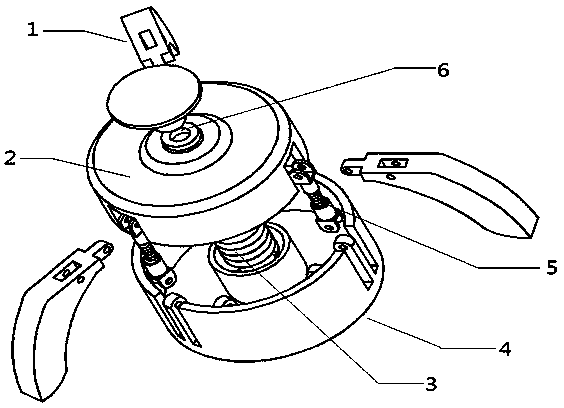
[0041] The foot end structure of the robot of this embodiment includes an upper end connector, an upper cover at the center of the palm, a lower cover at the center of the palm, a spring at the center of the palm, toes at the end of the foot, a toe spring, and a spherical hinge. In the present embodiment, there are three foot end toes and toe springs respectively. Wherein, the upper connecting piece is used to be connected with the main body of the robot, and the palm upper cover is flexibly connected with the upper connecting piece through a ball hinge.
[0042] At the same time, the upper connecting piece is flexibly connected with the palm upper cover, and the center of the palm upper cover is connected with the center of the palm lower cover through a palm spring. Further, in this embodiment, a telescopic sleeve can also be arranged on the palm spring. In this embodiment, the toe at the foot end includes a support portion and a connecting portion for contacting the ground...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More