

Trajectory tracking method for under-actuated unpiloted ship controlled based on limited backstepping method
A trajectory tracking and unmanned ship technology, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of parameter uncertainty, achieve good suppression, and solve the problem of output constraints Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] Below each part design method in the present invention is further described:
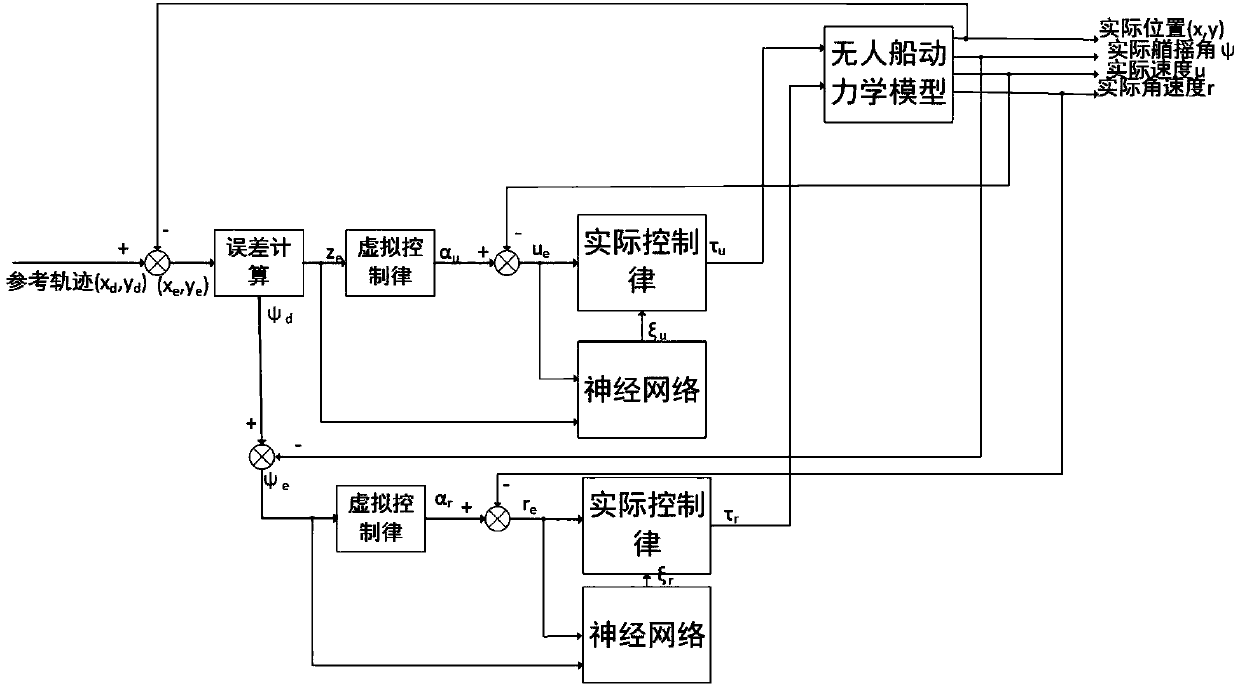
[0079] The present invention "a trajectory tracking method for underactuated unmanned ships based on limited backstepping control", such as figure 2 As shown, the specific steps are as follows:
[0080] Step 1: Kinematics and dynamics model establishment
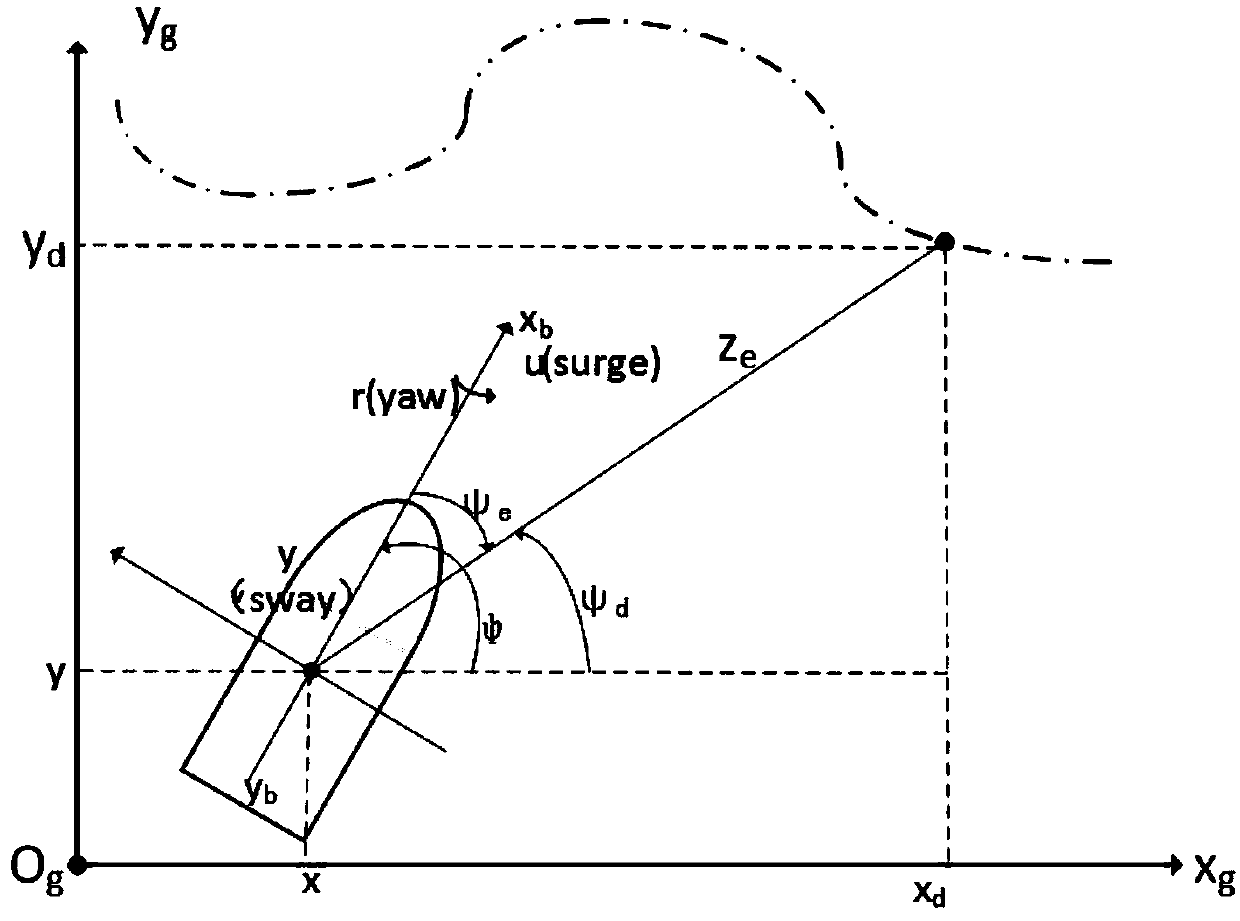
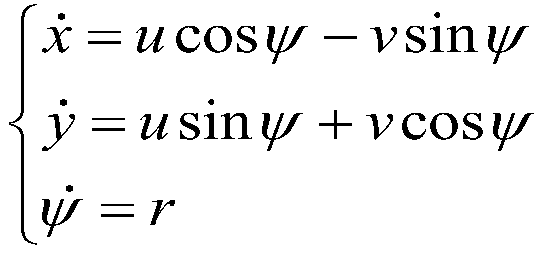
[0081] Establish the three-degree-of-freedom model of the unmanned ship in the inertial coordinate system, as shown in the attached figure 1 shown. o g x g the y g is an inertial coordinate system established on the earth, and the kinematics and dynamics equations of the unmanned ship in this coordinate system are
[0082]
[0083]
[0084] In the above equation, (x, y) represents the current position coordinates, ψ represents the current yaw angle of the unmanned ship, that is, the attitude variable, u is the forward speed, v is the lateral drift speed, and r is the yaw angular speed. is the system model parameter, which wil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More