

An online calibration method of dvl speed measurement error
A calibration method and error technology, applied in the field of inertial navigation systems, can solve problems such as the inability to calibrate the horizontal installation error angle and constant error, and the limitation of positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
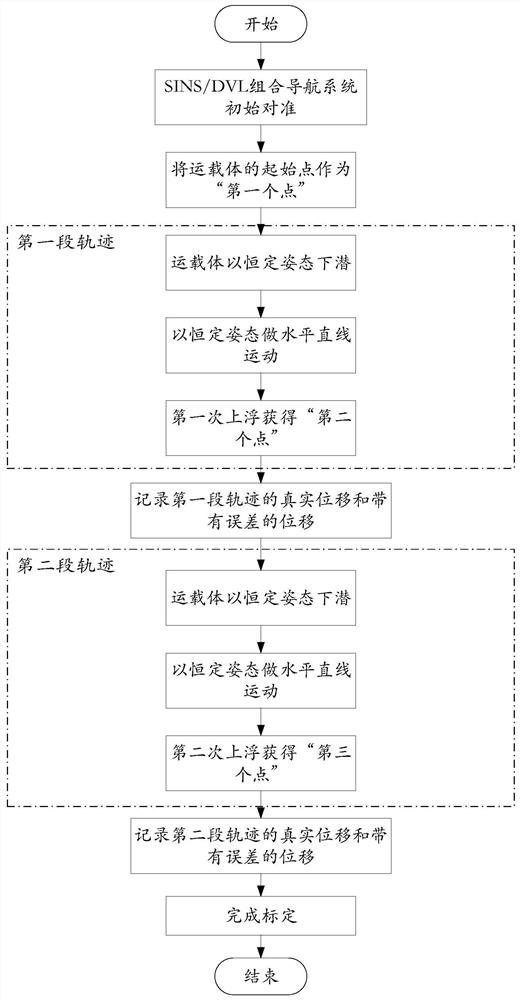
[0018] The present invention does not require the underwater vehicle to run on the water surface or near the water surface for a long time, and only needs the underwater vehicle to float twice to receive GNSS signals to complete the calibration. The carrier has been using SINS / DVL integrated navigation during operation, so that position information with errors can be obtained. The carrier floats twice to receive GNSS signals to obtain accurate position information.
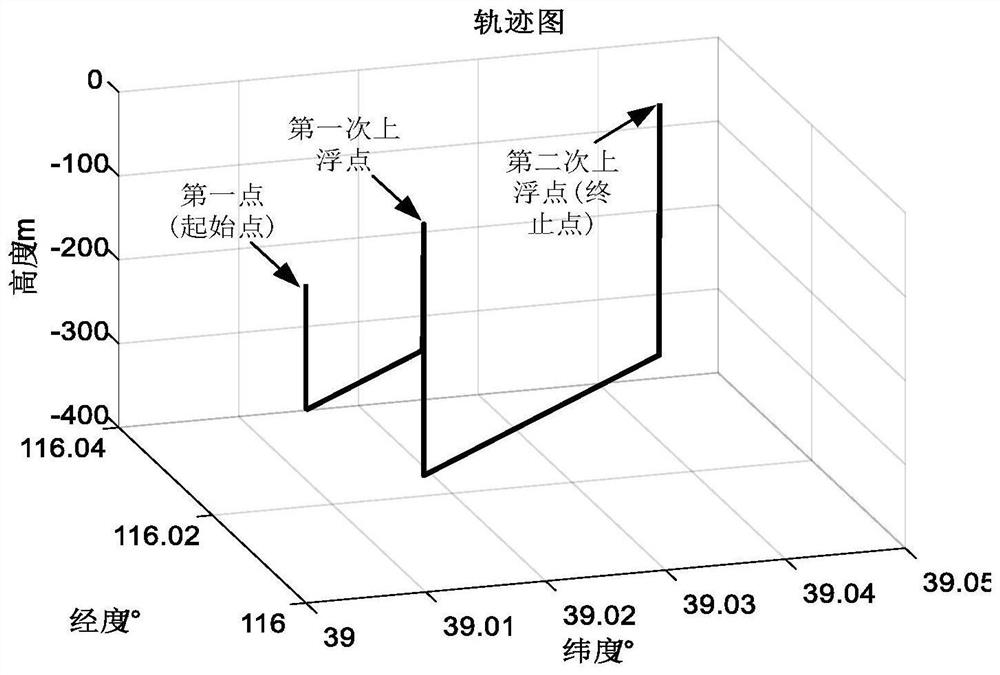
[0019] Such as figure 1 As shown, the present invention regards the starting point of the vehicle as the "first point" of the three-point online calibration method, and then allows the vehicle to dive with a constant attitude, and the depth of the dive can be measured by the pressure sensor that comes with the DVL. The submersible speed of the carrier can be calculated from the measured depth. After diving for a period of time, the carrier moves horizontally and linearly with a constant attitude, decelerates to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More