

A method for calibrating dvl error of model-free Doppler log
A Doppler log and error calibration technology, which is applied in the field of navigation systems, can solve problems such as the influence of calibration accuracy, the inability to accurately model the DVL error model, and the inability to guarantee the installation error angle of INS and DVL, and achieve high precision The effect of error calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below with reference to the accompanying drawings and examples.
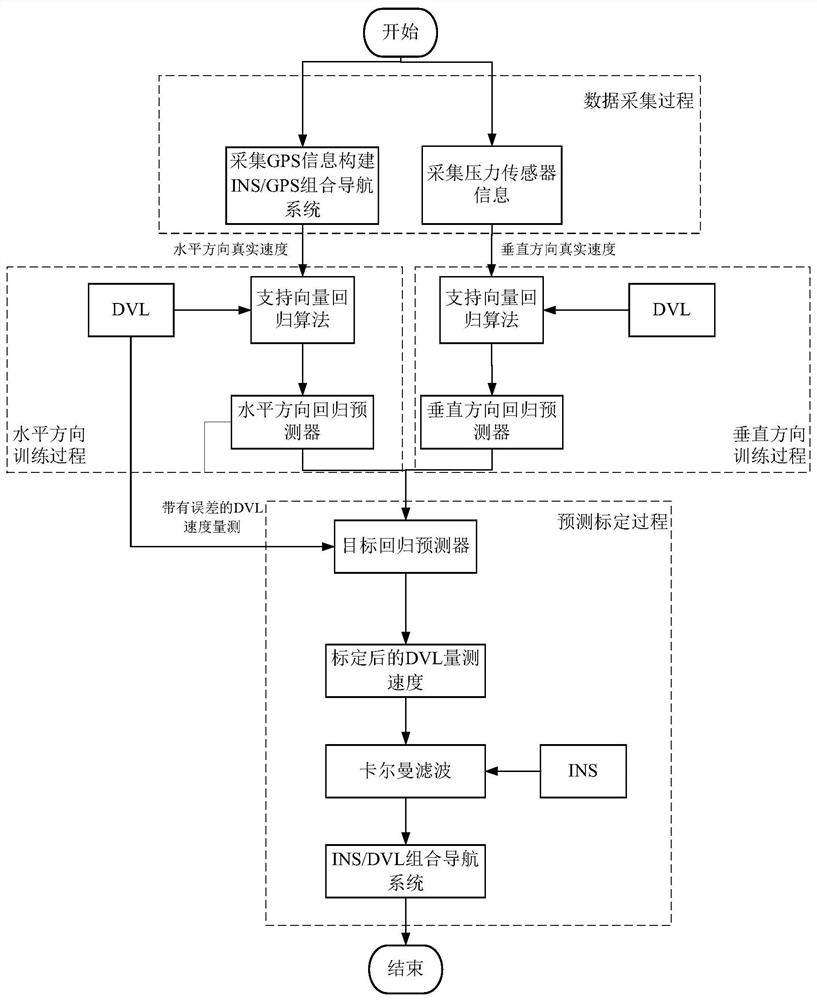
[0033] The invention provides a method for calibrating the DVL error of a model-free Doppler log, the flow principle of which is as follows figure 1 As shown, it specifically includes the following steps:
[0034] S1. During the underwater movement of the underwater carrier AUV, obtain the two-dimensional horizontal velocity information and vertical velocity information of the AUV respectively, and obtain the horizontal measurement velocity and Velocity is measured vertically.
[0035] In the embodiment of the present invention, during the underwater movement of the underwater carrier AUV, the INS / GPS integrated navigation system is used to obtain the two-dimensional horizontal velocity information of the AUV, that is, the AUV sails on the water surface to collect GPS information to build an INS / GPS integrated navigation System, the two-dimensional horiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More