

Floor sweeping robot based on depth camera
A sweeping robot and depth camera technology, applied in the field of intelligent robots, can solve problems such as high cost and difficulty in capturing spatial information, achieve low cost, accurate depth information, and meet the needs of sweeping and mopping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments . Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
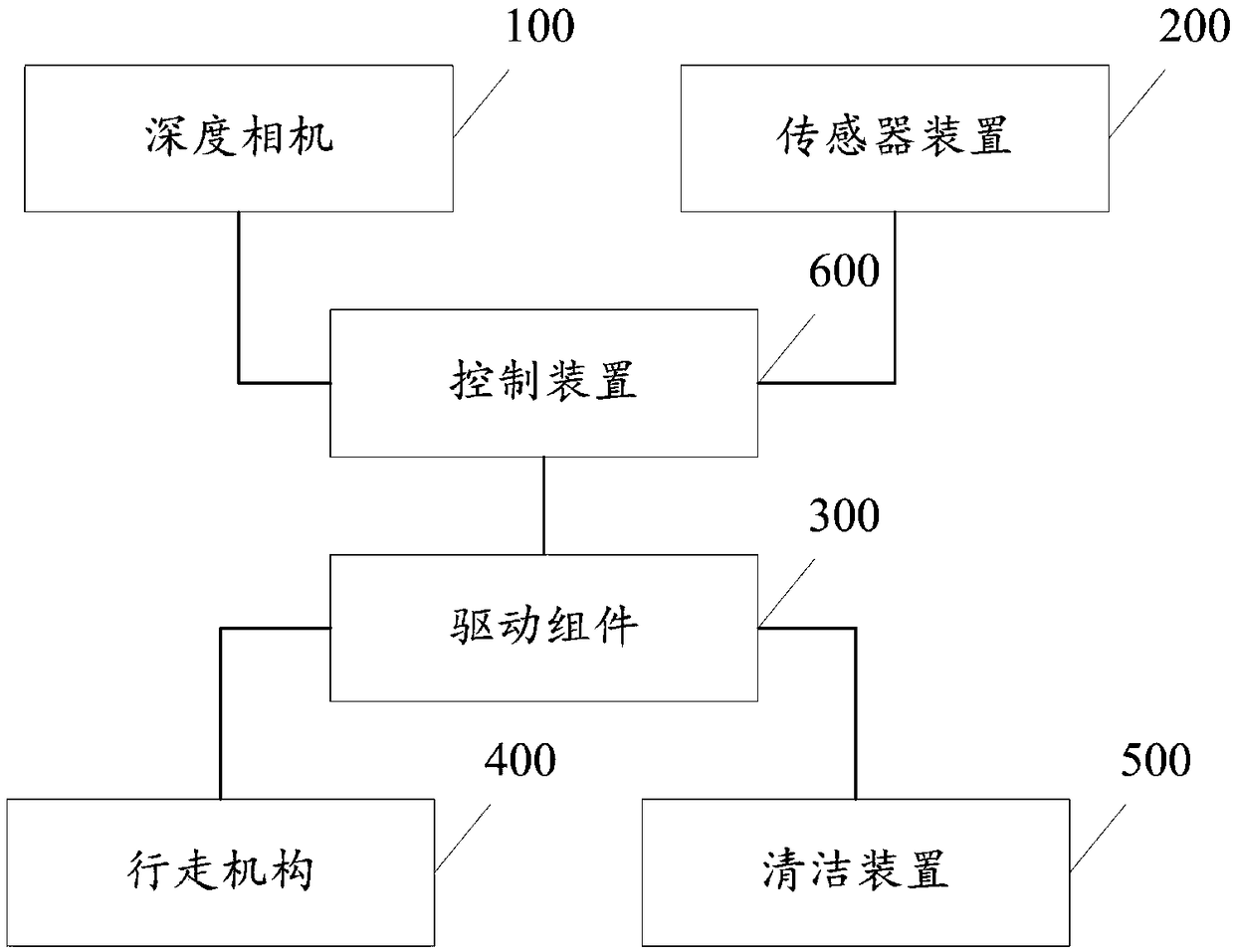
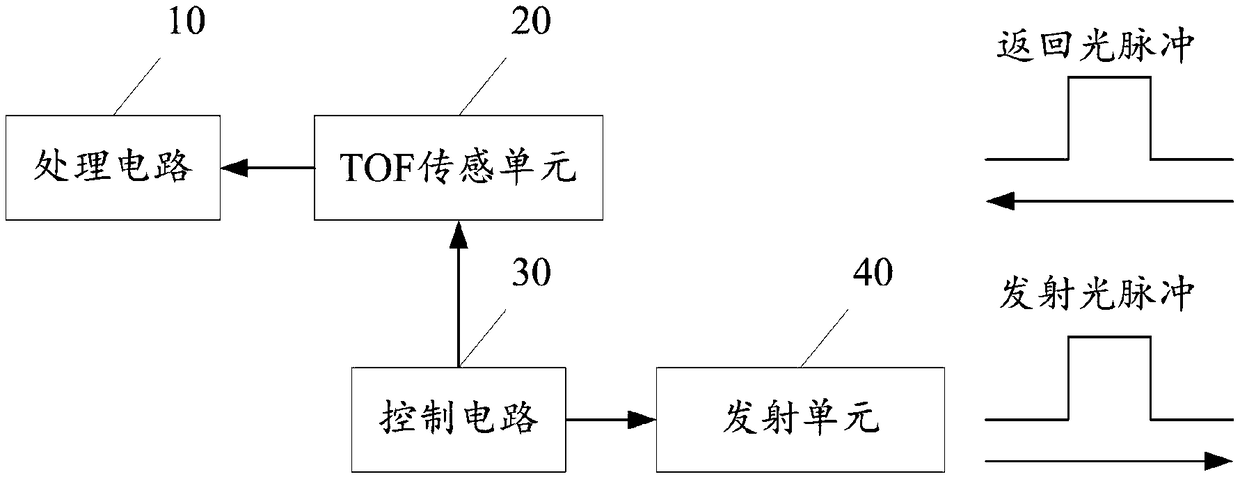
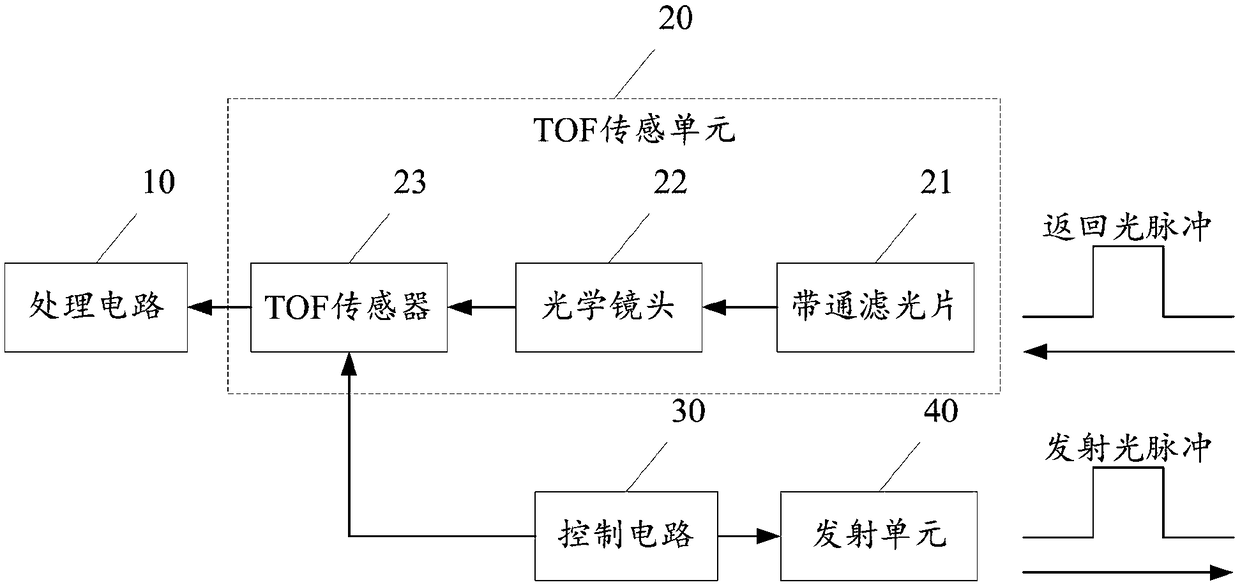
[0032] The present invention provides a sweeping robot based on a depth camera, which includes a housing, and further includes: a depth camera installed on the top of the housing for collecting environmental color information and depth information around the sweeping robot; a sensor device installed on The housing is used to collect sensing information of the surrounding environment when the sweeping robot moves; the traveling mechanism is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More