

A multi-axis synchronous trajectory planning method, system and computer-readable storage medium
A trajectory planning, multi-axis synchronization technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unstable operation, unstable force, unstable acceleration, etc., to achieve short movement time, displacement and speed synchronization, The effect of increasing the stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
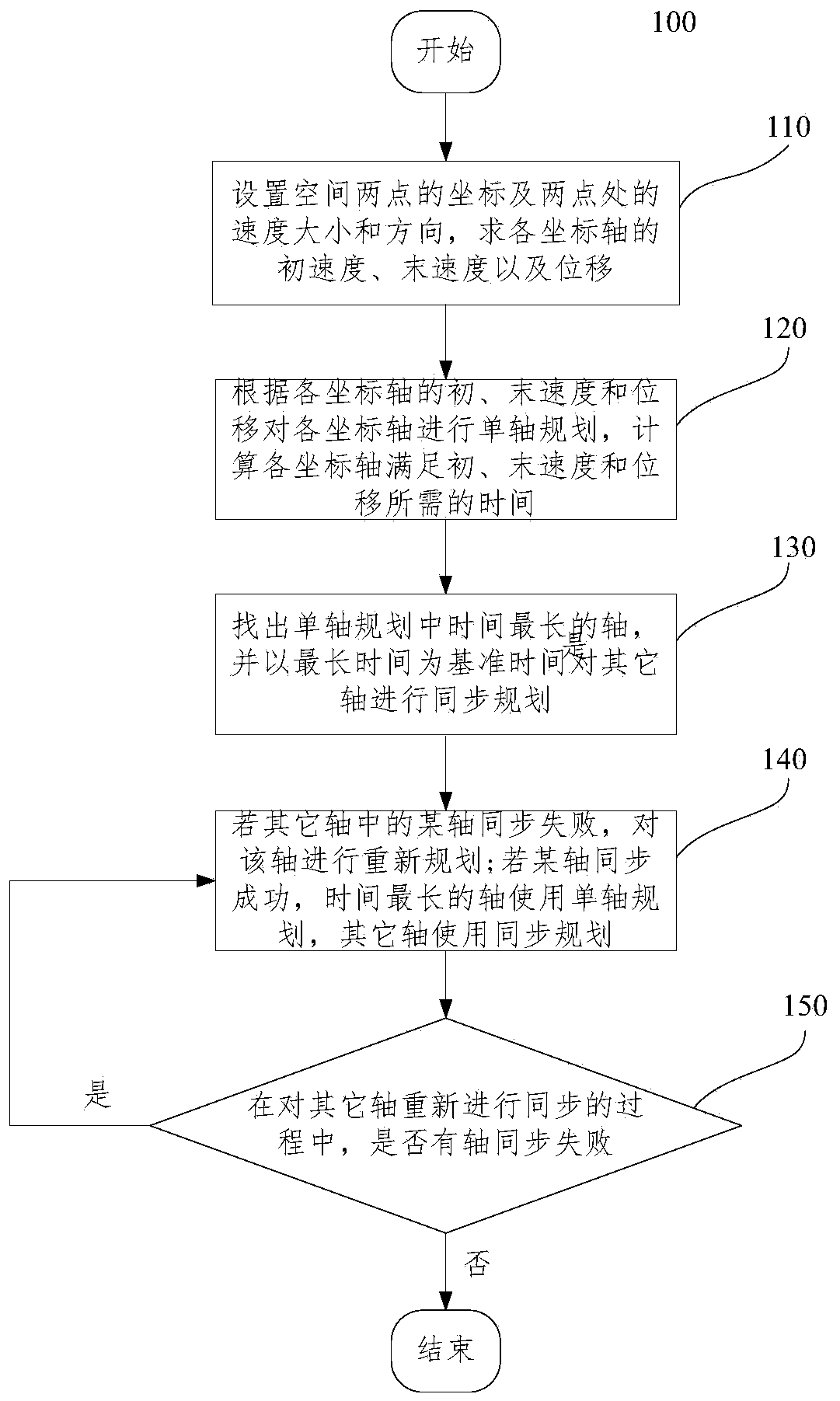
[0051] Such as figure 1 As shown, the present invention provides a multi-axis synchronous trajectory planning method 100, comprising the following steps:
[0052] Step 110, set the coordinates of two points in space and the magnitude and direction of the speed at the two points, the two points in space are respectively the starting point and the end point, and ask for the initial speed of the starting point of each coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More