

Tendon rope transmission coupling self-adaption three-finger differential motion robot hand paw device
A robot hand and self-adaptive technology, applied in the field of robots, can solve the problems of small grasping range, small grasping force, and difficult assembly, and achieve the effect of large grasping range, large grasping force, and stable and reliable grasping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
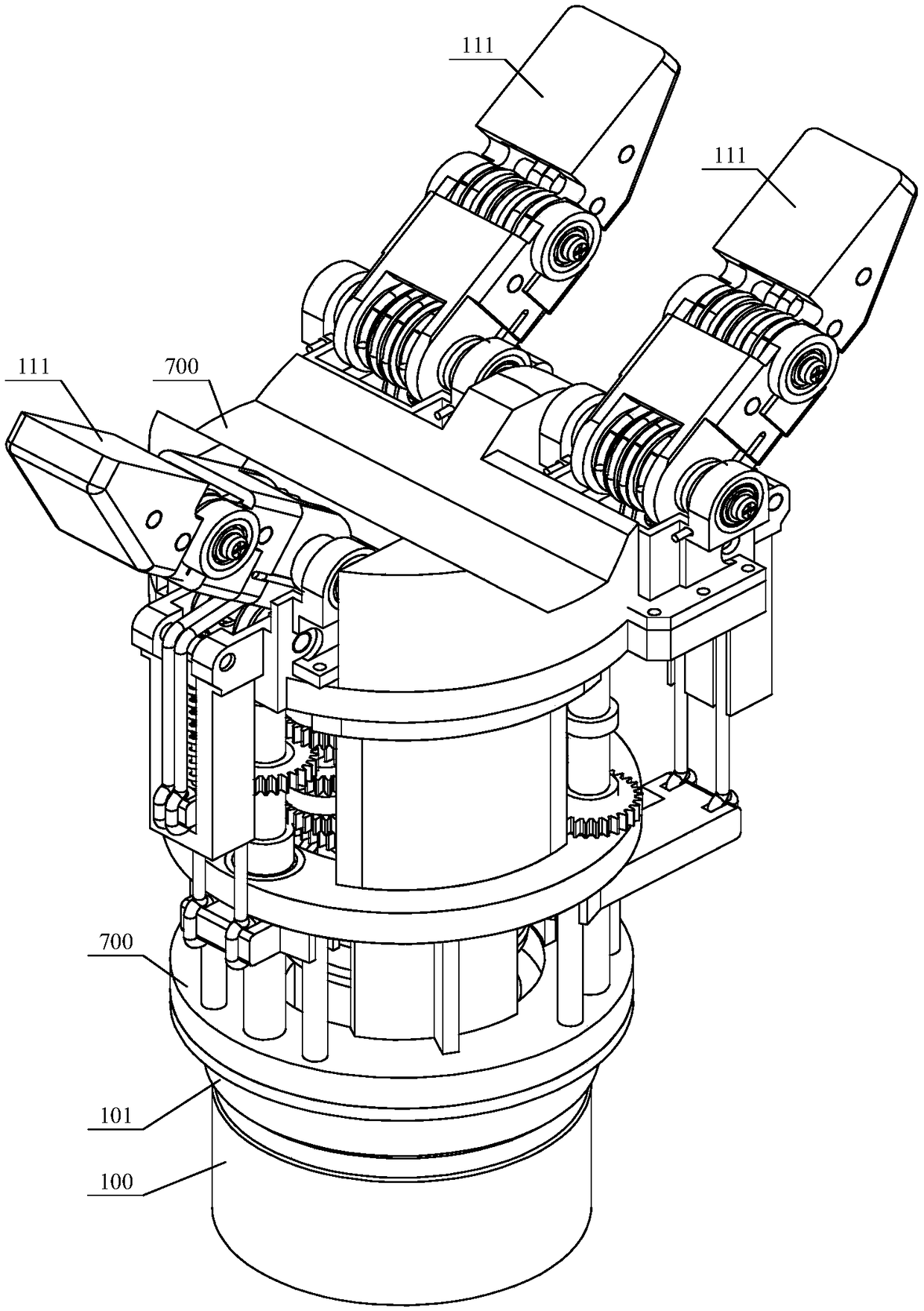
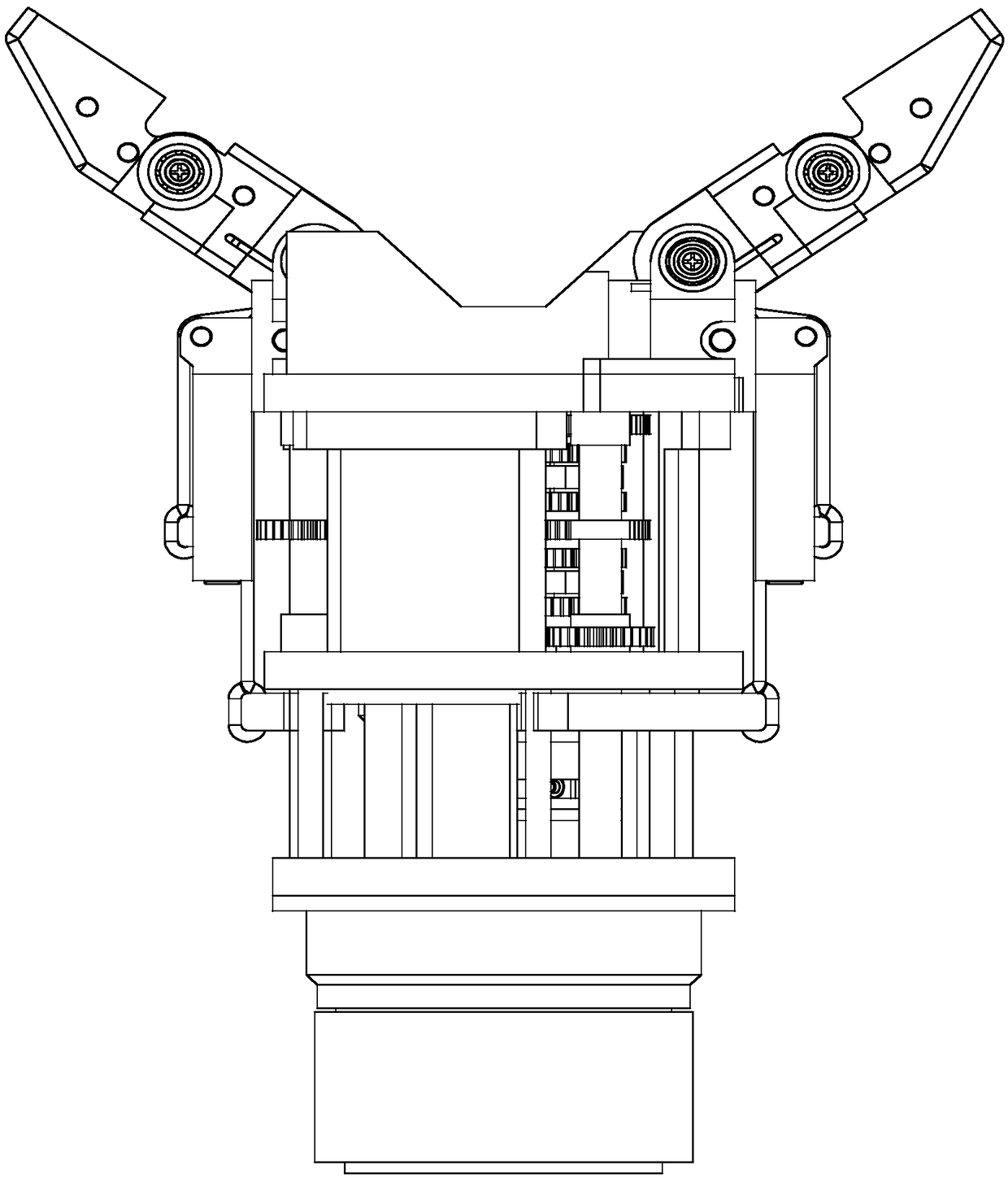
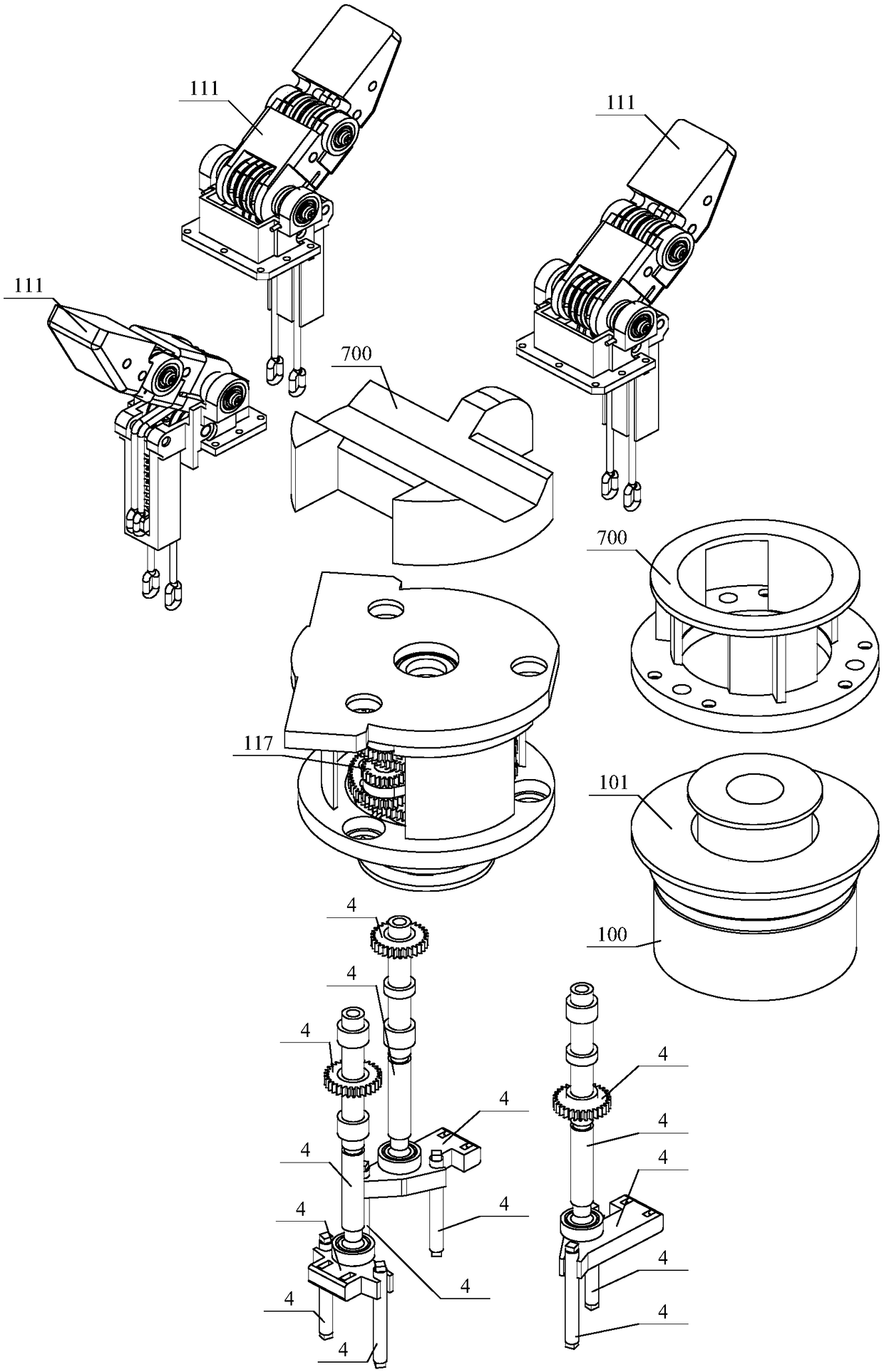
[0049] A coupling adaptive three-finger differential robot gripper device designed by the present invention, comprising a gripper base 700, a driver 100 and a gripper transmission mechanism 101; the driver 100 is fixedly connected to the gripper base 700 , the output end of the driver 100 is connected to the input end of the gripper transmission mechanism 101; the coupled adaptive three-finger differential robotic gripper device of the tendon rope transmission also includes a single-input three-output differential 117 and three double tendons rope series coupling adaptive finger 111; the single-input three-output differential 117 is fixed on the gripper base 700 and is driven by the gripper transmission mechanism 101; the three double-tendon ropes are serially coupled adaptive fingers 111 is fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More