

Double tendon rope series coupling adaptive finger device
A self-adaptive, tandem technology, applied in the field of robot gripper, can solve the problems of small grasping force, small grasping range, large dead zone, etc., and achieve the effect of large tolerance, grasping force, and large grasping range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
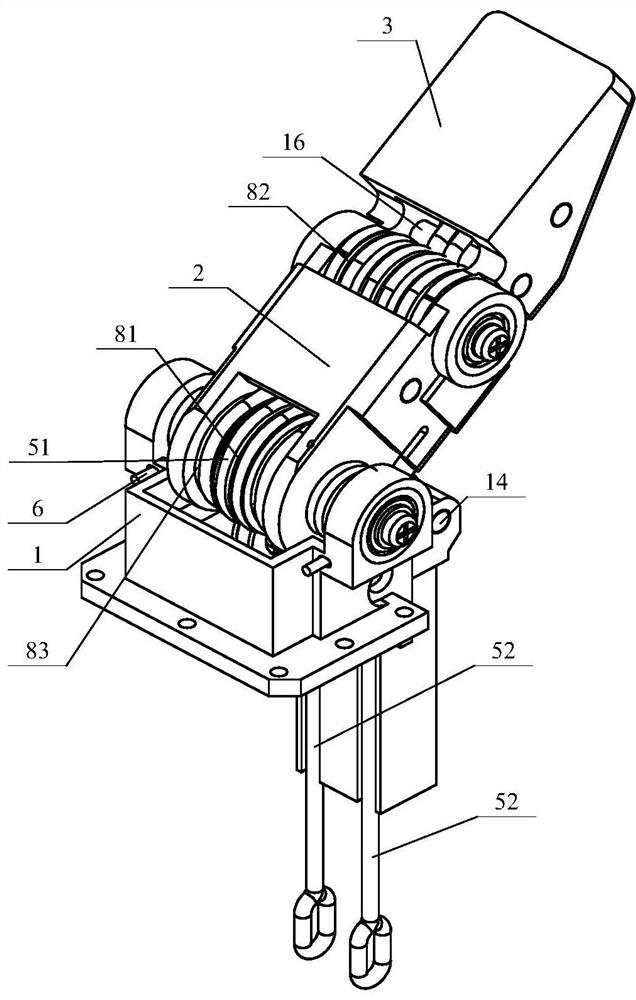
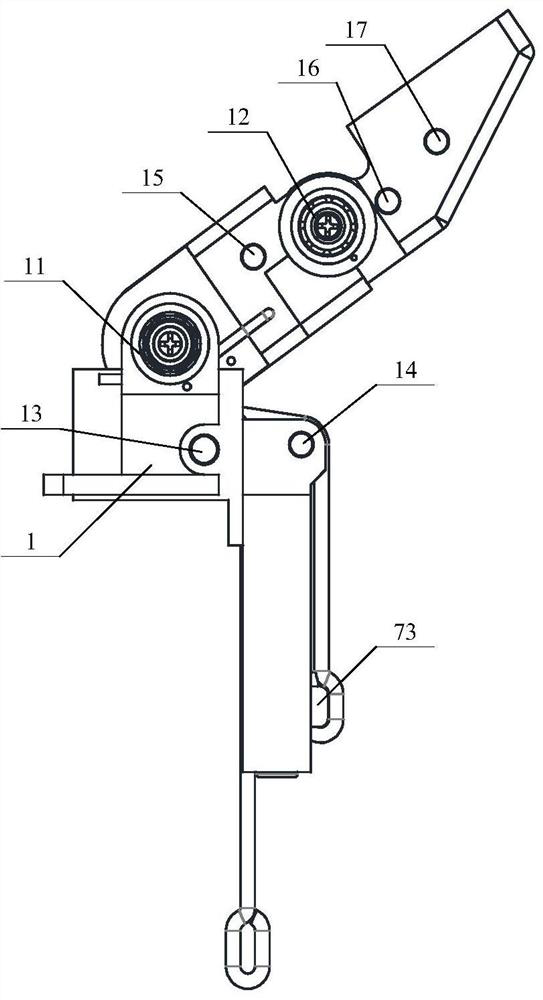
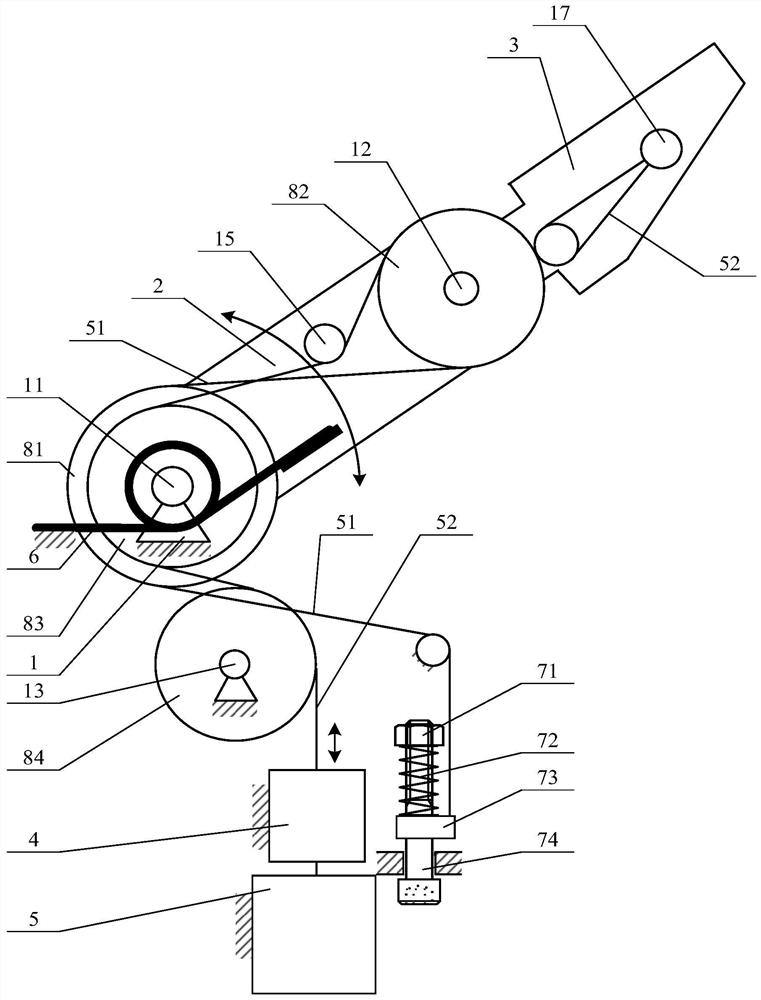
[0041] A dual tendon rope series coupling self-adaptive finger device designed by the present invention includes a base 1, a first knuckle 2, a second knuckle 3, a first joint shaft 11, a second joint shaft 12, and a second sheave 82. Transmission mechanism 4, driver 5, first spring member 6, at least one first sheave 81, at least one third sheave 83; said first joint shaft 11 is rotatably arranged in base 1, said first The knuckle 2 is fixedly connected to the first joint shaft 11, the second joint shaft 12 is rotatably arranged in the first knuckle 2, the second knuckle 3 is fixedly connected to the second joint shaft 12, and the second knuckle 3 is fixedly connected to the second joint shaft 12. The center line of a joint shaft 11 is parallel to the center line of the second joint shaft 12; the first sheave 81 and the third sheave 83 are respectively rotatably connected to the first joint shaft 11, and the second sheave 82 The outer circular surface is provided with at leas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More