

Interventional surgical robot subordinate end device and control method thereof
A technology of interventional surgery and control method, applied in the field of interventional surgery robot slave device and its control, can solve the problems of inconvenient disassembly and assembly, complicated operation structure of catheter guide wire, etc., and achieves convenient disassembly and assembly, simple and quick connection, and simplified clamping effect of structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
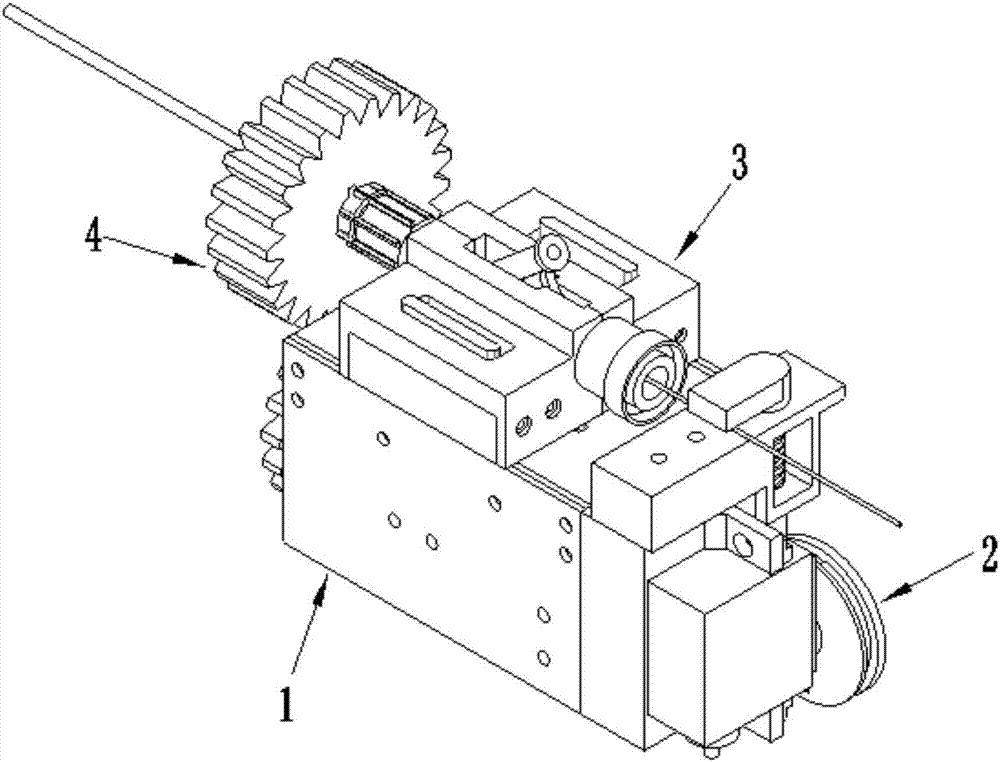
[0075] like figure 1As shown, this embodiment provides a slave device for an interventional surgery robot, which mainly includes five parts, namely the main body part 1, the guide wire clamper 2, the catheter holder 3, the torsion component 4 and the force measurement component 5 ; Wherein, the main body part 1 is the installation basis of the other four parts, the catheter clamper 3 and the guide wire clamper 2 can be detachably installed on the main body part 1, and the guide wire clamper 2 is used to clamp the guide wire Tighten or loosen, the catheter holder 3 is used to clamp the catheter, the twisting assembly 4 is used to complete the twisting operation on the catheter, and the force measuring assembly 5 is used to detect the pushing force of the catheter. Through the mutual cooperation of various parts, the device can complete the clamping, pushing, twisting and force measurement of the catheter, as well as the clamping or loosening of the guide wire, so as to realize ...
Embodiment 2
[0093] This embodiment provides a control method for the slave device of an interventional surgery robot. The device in Embodiment 1 is used to control the catheter and the guide wire, and mainly completes the clamping, pushing, twisting and force measurement of the catheter, as well as the control of the guide wire. Clamping and loosening, and the cooperative control of the catheter and guide wire meet the operational requirements of interventional surgery. The corresponding operating steps will be described in detail below.
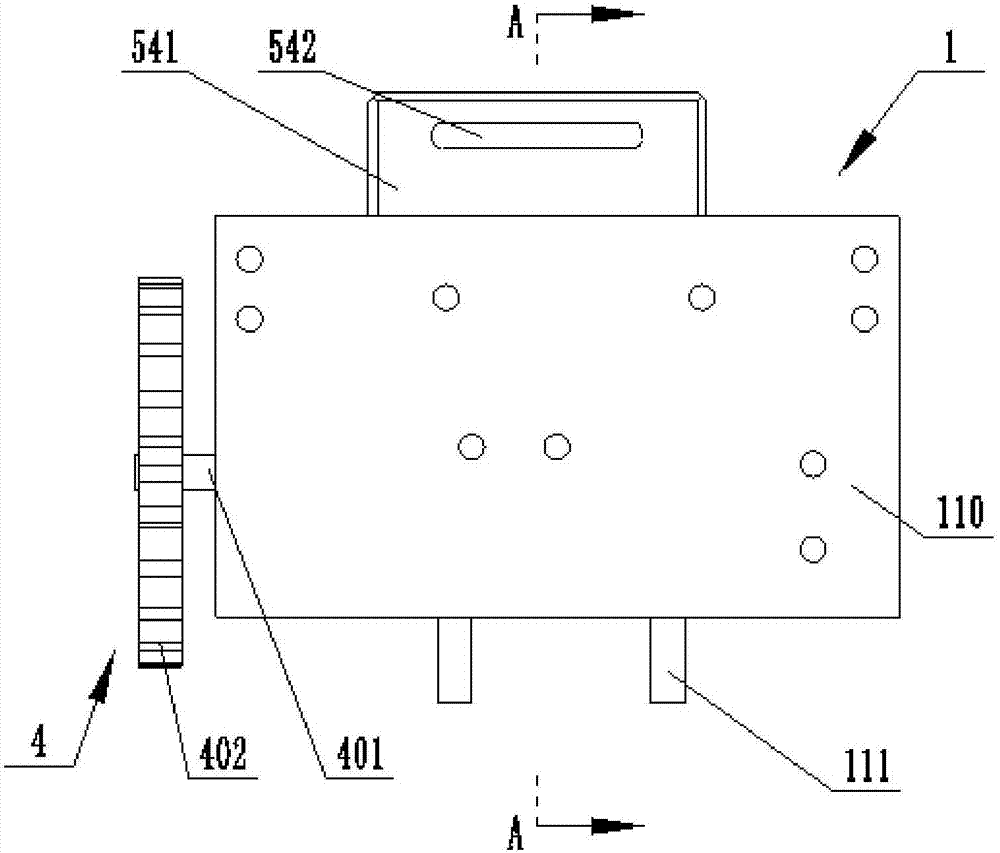
[0094] Firstly, the main body 1 is installed on the external mobile platform through the board 111 .
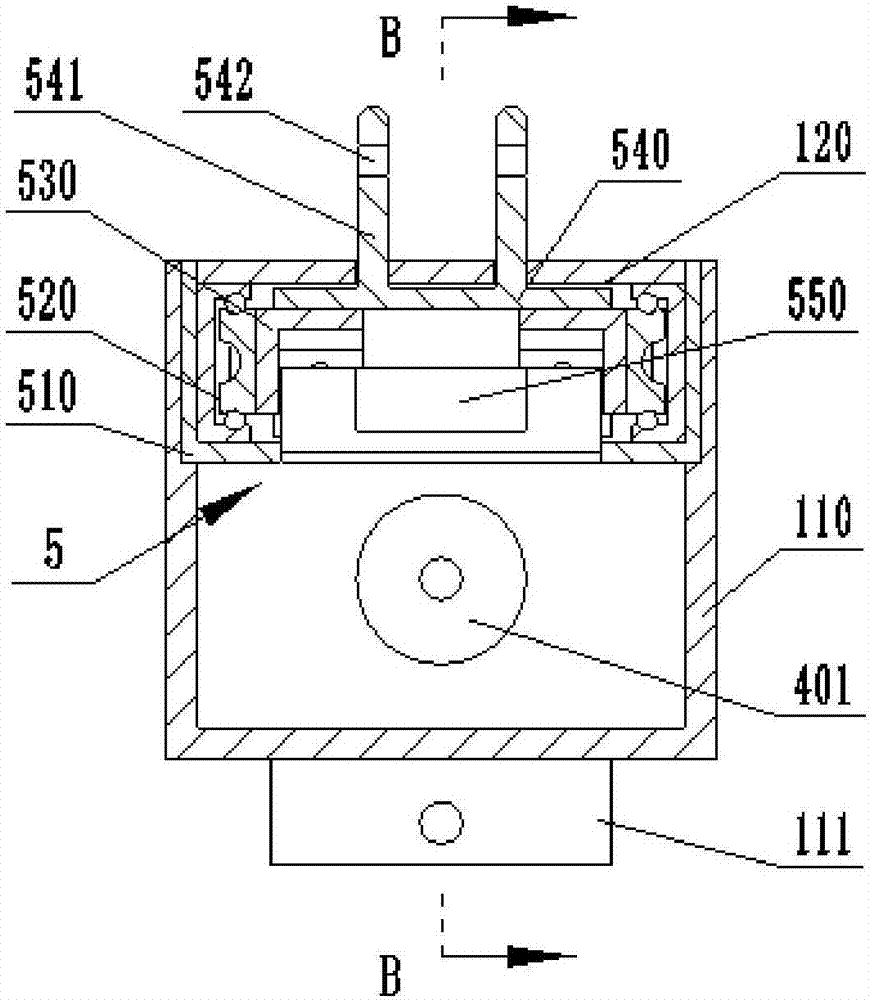
[0095]Then, the catheter holder 3 clamps and installs the catheter, specifically: first connect and install the tail end of the catheter to the connecting sheath 324, and at the same time install the large gear 403 and the connecting sheath 324 in this step, for the subsequent twisting assembly 4 Prepare for transmission; then screw the connecting shea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More