

Passive decoupling mechanism for joint movement of tandem rope-driven manipulator
A joint motion and manipulator technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of joint motion coupling of serial rope-driven manipulators, and achieve the effects of less wear, less breakage, and simplified design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in detail below in conjunction with accompanying drawing:
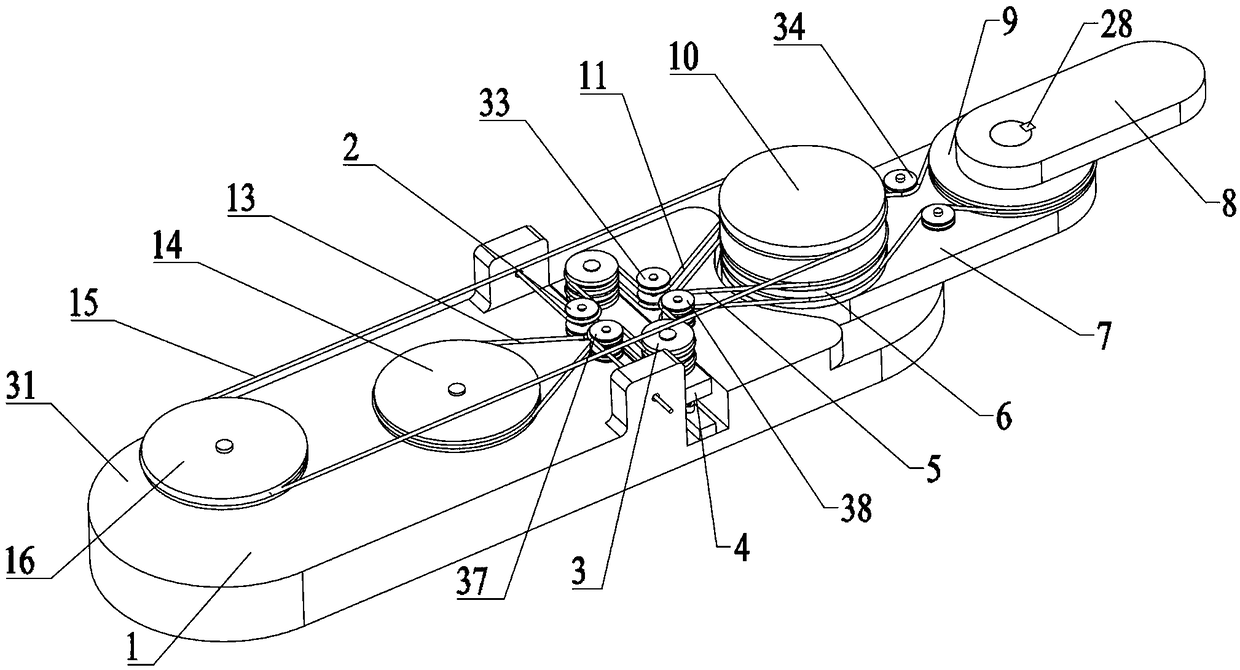
[0037] refer to figure 1 , the passive decoupling mechanism for the joint motion of the serial rope-driven manipulator according to the present invention includes a base system 1, a decoupling module 4, a No. 1 decoupling rope 5, a No. 1 arm system 7, a No. 2 arm 8, and a No. 2 solution Coupling rope 11, No. 2 driving rope 13 and No. 1 driving rope 15;
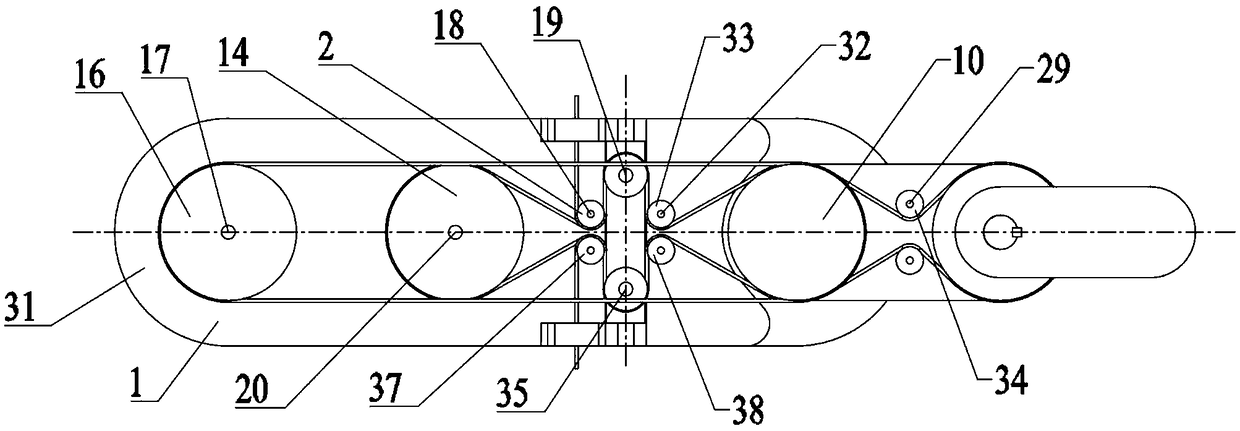
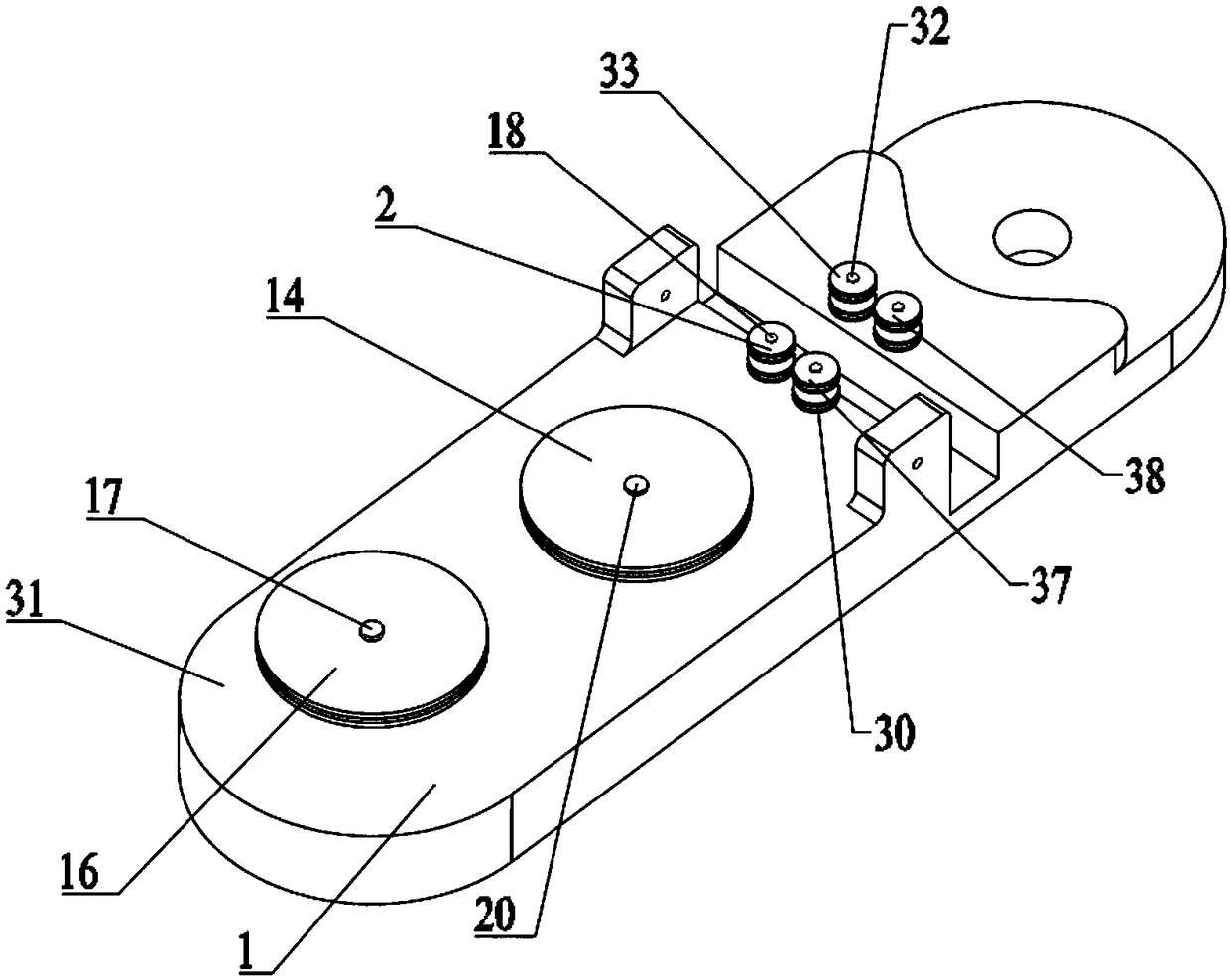
[0038] refer to figure 2 and image 3 , the base system 1 includes No. 1 guide wheel set 2, No. 2 driving wheel 14, No. 1 driving wheel 16, No. 1 pin 17, 2 No. 3 pins 18, No. 2 pin 20, base Plate 31, 2 No. 6 pins 32 with the same structure, No. 2 guide wheel group 33, No. 3 guide wheel group 37 and No. 4 guide wheel group 38.
[0039] Described No. 1 guide wheel set 2 is made up of two small pulleys 30, and two small pulleys 30 are vertically stacked and installed, and their centerlines coincide. The small pulley 30 is d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More