

Single-arm mechanical arm self-adaptation controller and control method based on output position
An adaptive controller and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as good results and no control scheme.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
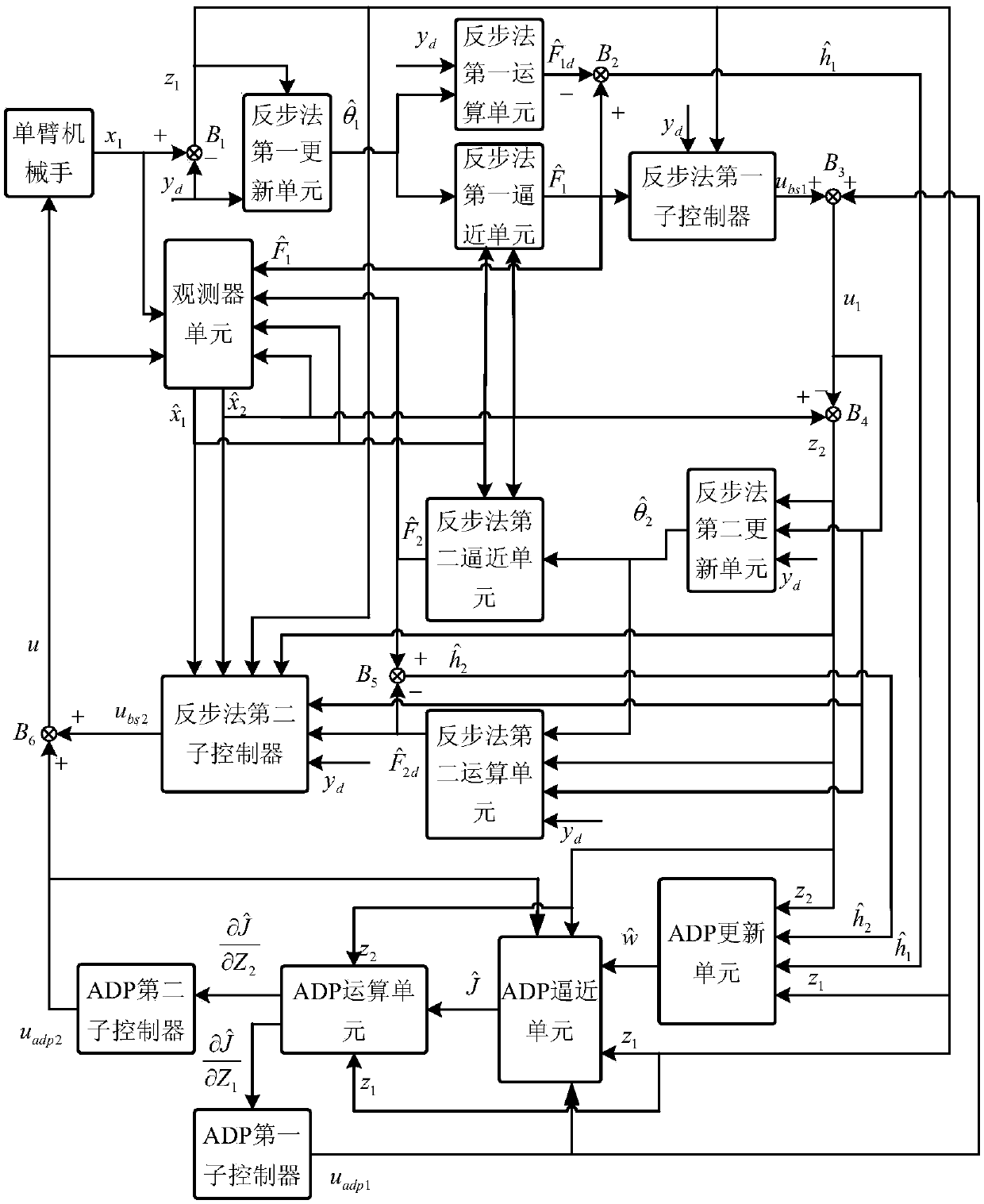
[0104] Such as figure 1 As shown, the present invention discloses an adaptive controller and control method for a single-arm manipulator based on the output position.
[0105] In the design process of the controller, based on the premise of the output position, the present invention uses the fuzzy logic system and the adaptive backstepping control design method to design the backstepping method controller, and then uses the adaptive dynamic programming method (AdaptiveDynamic Programming, ADP) The ADP controller is designed with the neural network technology, so that the performance index of the single-arm manipulator system can be optimized. Combining the backstepping controller and the ADP controller, an adaptive fuzzy optimal controller based on the output position is designed.
[0106] Specifically, an adaptive controller for a single-arm manipulator based on the output position, which is connected to the single-arm manipulator system, is characterized in that it includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More