

AGV traffic control regulation method based on path analysis
A technology of traffic control and path analysis, applied in control/adjustment system, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve problems that cannot meet the needs of production and life, and cannot guarantee the high efficiency of AGV cars Single operation and planning strategies, etc., to improve operation efficiency, ensure pertinence, and avoid operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
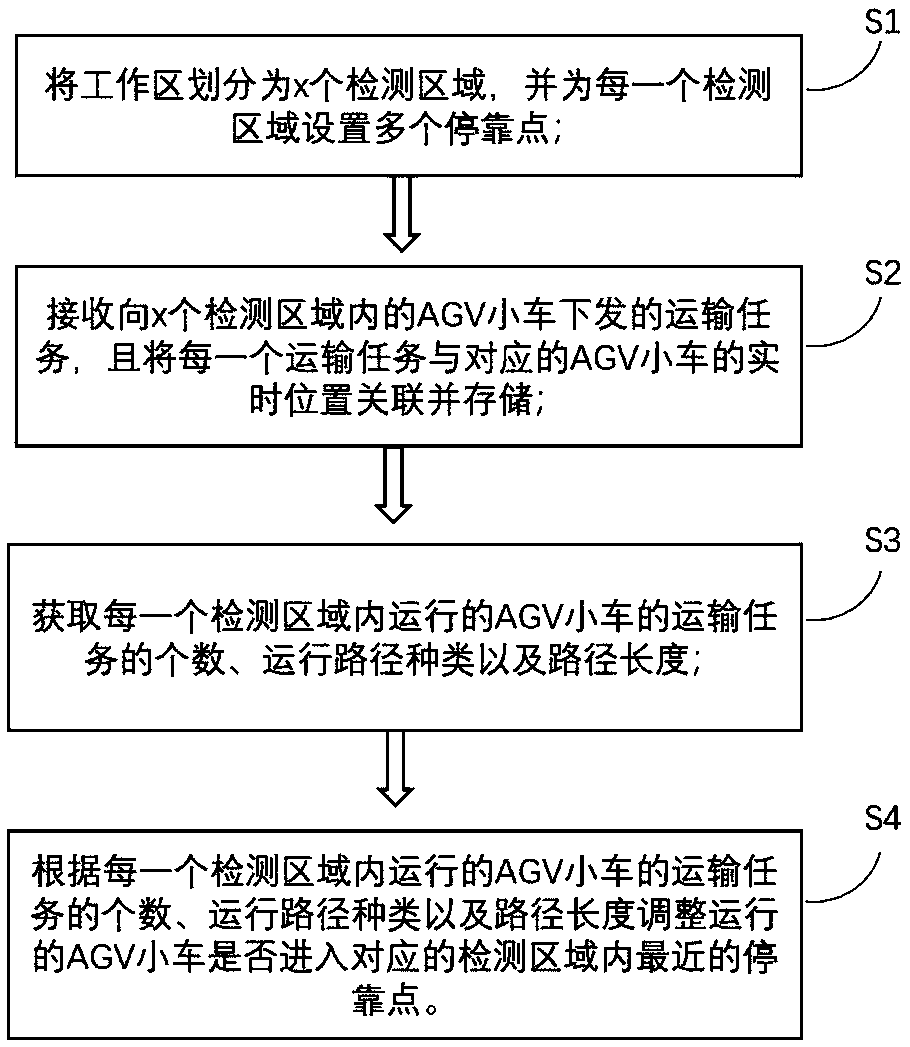
[0025] Such as figure 1 as shown, figure 1 It is a path analysis-based AGV trolley traffic control control method proposed by the present invention.
[0026] refer to figure 1 , the AGV dolly traffic control method based on path analysis proposed by the present invention comprises the following steps:
[0027] S1. Divide the work area into x detection areas, and set multiple stops for each detection area;
[0028] By subdividing the working area into multiple small detection areas, it is beneficial to improve the pertinence and effectiveness of detecting the actual running status of the AGV trolley in each detection area.
[0029] Setting multiple stops is beneficial to reduce the time for the running AGV to move to the stop, and to improve the operating efficiency of the AGV.
[0030] S2. Receive the transportation tasks issued to the AGV cars in the x detection areas, and associate and store each transportation task with the real-time position of the corresponding AGV ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More