

A pedestrian detection method in unmanned driving based on improved YOLOv2
An unmanned driving and pedestrian detection technology, applied in the field of pedestrian detection, can solve the problems of low detection rate, complex calibration of training samples, and handling pedestrians with multiple postures, so as to improve the accuracy and ensure the detection speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
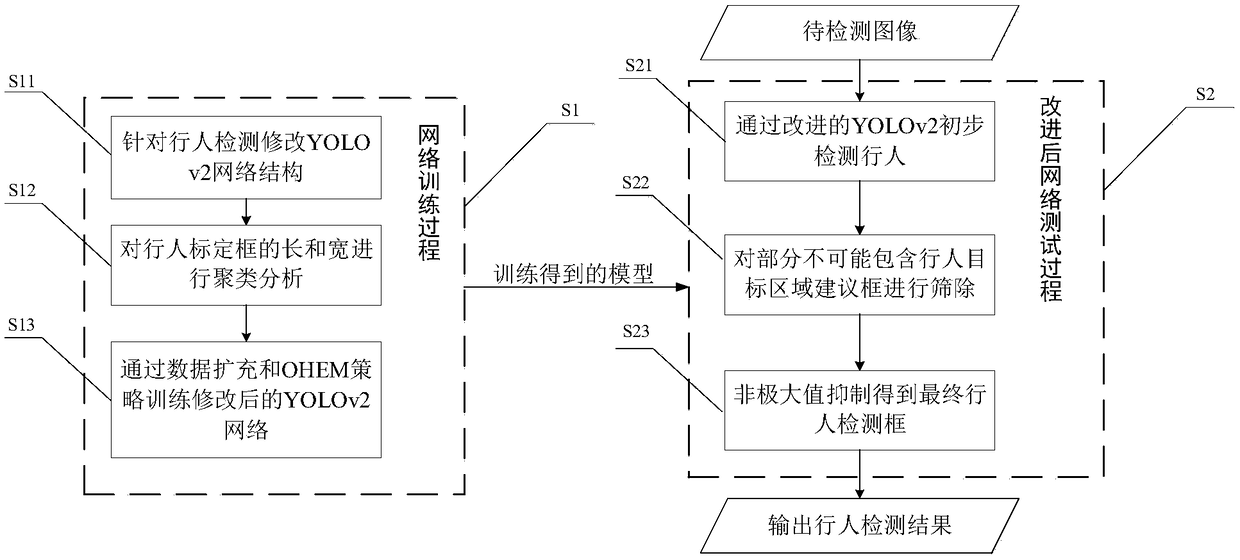
[0034] The basic process of the present invention is as figure 1 As shown, first, the YOLOv2 network is trained through the KITTI dataset to obtain the training model. Then, capture the video through the car camera, use each frame in the video as the input of the YOLOv2 network, and import the training model into the YOLOv2 network. Then run the network to initially obtain the position information and probability of the detected pedestrians. Finally, after filtering some proposal frames that are unlikely to contain pedestrian target areas, the final pedestrian detection frame is obtained by using...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More