

Movable robot capable of automatically collecting and arranging snooker balls
A snooker and robot technology, applied to billiards, bowling, sports accessories, etc., can solve the problems affecting the game process, cumbersome installation, etc., and achieve the effect of high labor consumption, high positioning accuracy and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] Example 1: walking of the robot
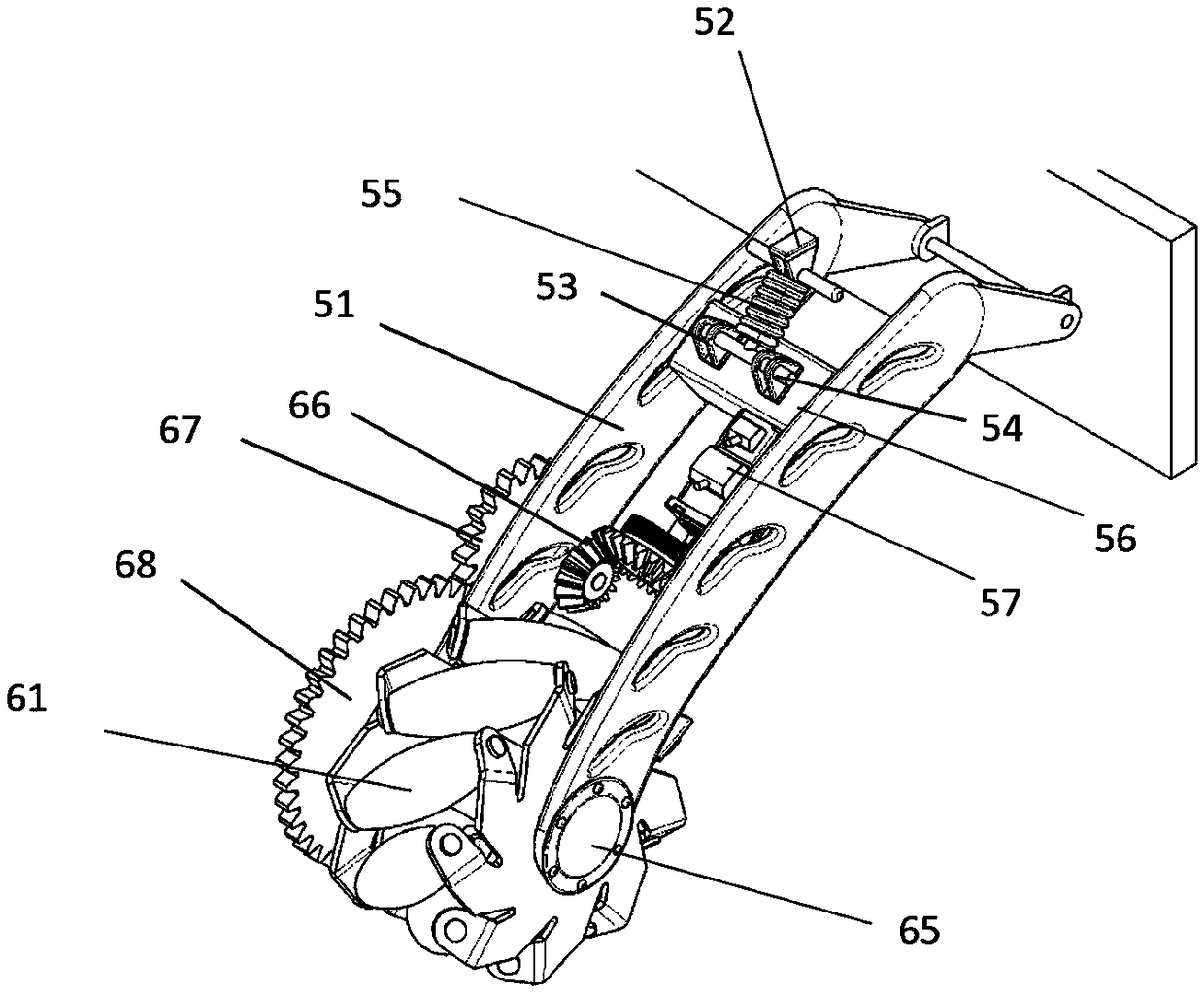
[0043] The motor E57 starts, drives the spur gear C60 to rotate, and the spur gear C60 drives the spur gear B58 to rotate, thereby driving the bevel gear C59, bevel gear D66, spur gear D67, and spur gear E68 to rotate, wherein the bevel gear C59 and bevel gear D66 realize the rotation of the motor E57 The change of transmission speed direction; the spur gear E68 drives the axle 65 to realize the rotation of the mecanum wheel 61 .
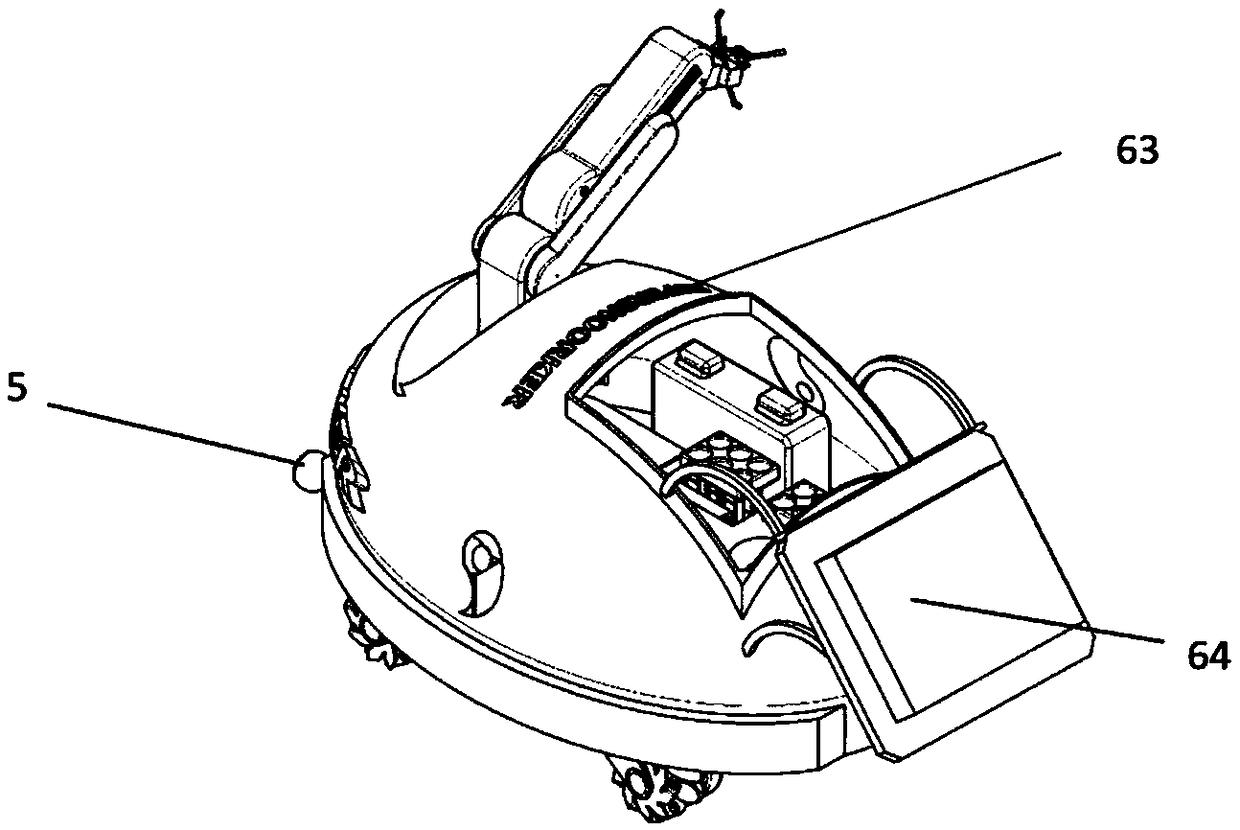
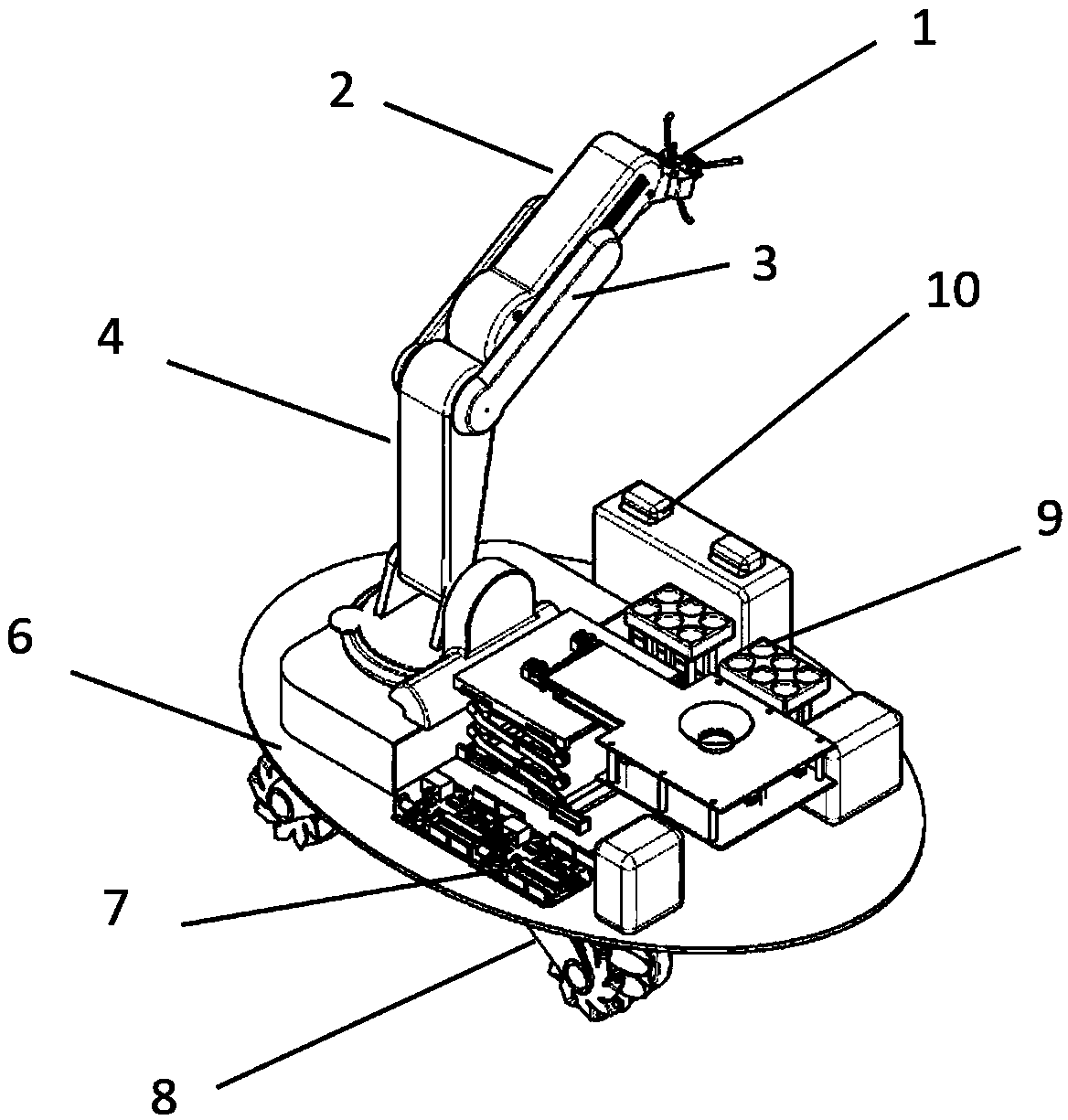
[0044] The legs of the robot are composed of four leg walking mechanisms 8, which can respectively change the forward and reverse rotation of the mecanum wheel 61 by changing the rotation direction of the motor E57 to realize the forward movement, reverse movement, left and right movement of the robot, Turn left and right and rotate in place. The front camera 5 can help the robot avoid obstacles when the robot is walking.
Embodiment 2
[0045] Example 2: The robot catches the ball
[0046] Before the start of the game, grab the colored balls except the red balls and put them on the corresponding positions to realize the ball swing function; during the game, if the colored balls except the red balls fall into the net, the robot will The corresponding colored balls in the ball frame 9 are grabbed and placed on the corresponding seats of the billiard table, and the colored balls falling into the net except the red ball are grabbed and put back into the colored ball frame 9 to save time during the game. Auxiliary function; after the game is over, the robot grabs all the balls on the pool table and in the net, puts the red balls into the triangular frame, and puts the colored balls into the colored ball frame 8 to realize the function of collecting balls.
[0047] Take collecting the ball after the game as an example: after the game, the recognition of the color of the billiard balls is realized through the mechan...
Embodiment 3
[0050] Embodiment 3: triangular frame pendulum ball
[0051] After the match, the red ball grabbed by the mechanical claw 1 was put into the built-in triangular frame 49 through the funnel 44 . Red ball rolls down successively and is arranged in equilateral triangle inside built-in triangular frame 49. Further, the sponge 50 attached to the inner wall of the built-in triangular frame 49 plays a fastening and non-slip effect on the red ball.
[0052] Before the game, the robot walks to the middle of the wide side of the billiard table through the walking mechanism 8; the cylinder 41 drives the scissor lift platform to rise; The screw mandrel rotates, and the screw mandrel turns the rotary motion into a linear motion by the fixed block 45 with threads to make the triangular frame roll out, so that the red ball is placed in the correct position.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More