

A dish-shaped underwater vehicle based on vector propulsion
An underwater robot and vector propulsion technology, which is applied to propulsion components, ship propulsion, underwater ships, etc., can solve the problems of no corresponding disclosure of technical solutions, and achieve the effect of improving stability and reducing navigation resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] The robot is a remote-controlled underwater robot, namely ROV. The specific technical solution is as follows: the shape of the robot is dish-shaped, that is, the light shell of the underwater robot is dish-shaped. There are four vector propulsion devices inside the underwater robot, and each vector propulsion device has two propellers, and the propellers can rotate around the axis of the propeller center, and the propellers are water jet propellers. The water jet propeller is connected with the steering gear through the connecting piece, and the steering gear is used to change the direction of the nozzle of the water jet propeller. The inside of the light shell is the main frame of the underwater robot and the pressure chamber. The cabin is used to load various electronic components for controlling the underwater robot, including the main controller, battery, step-down chip, attitude sensor, optical transceiver, depth gauge and so on. The end of the pressure-resistant c...
Embodiment 2
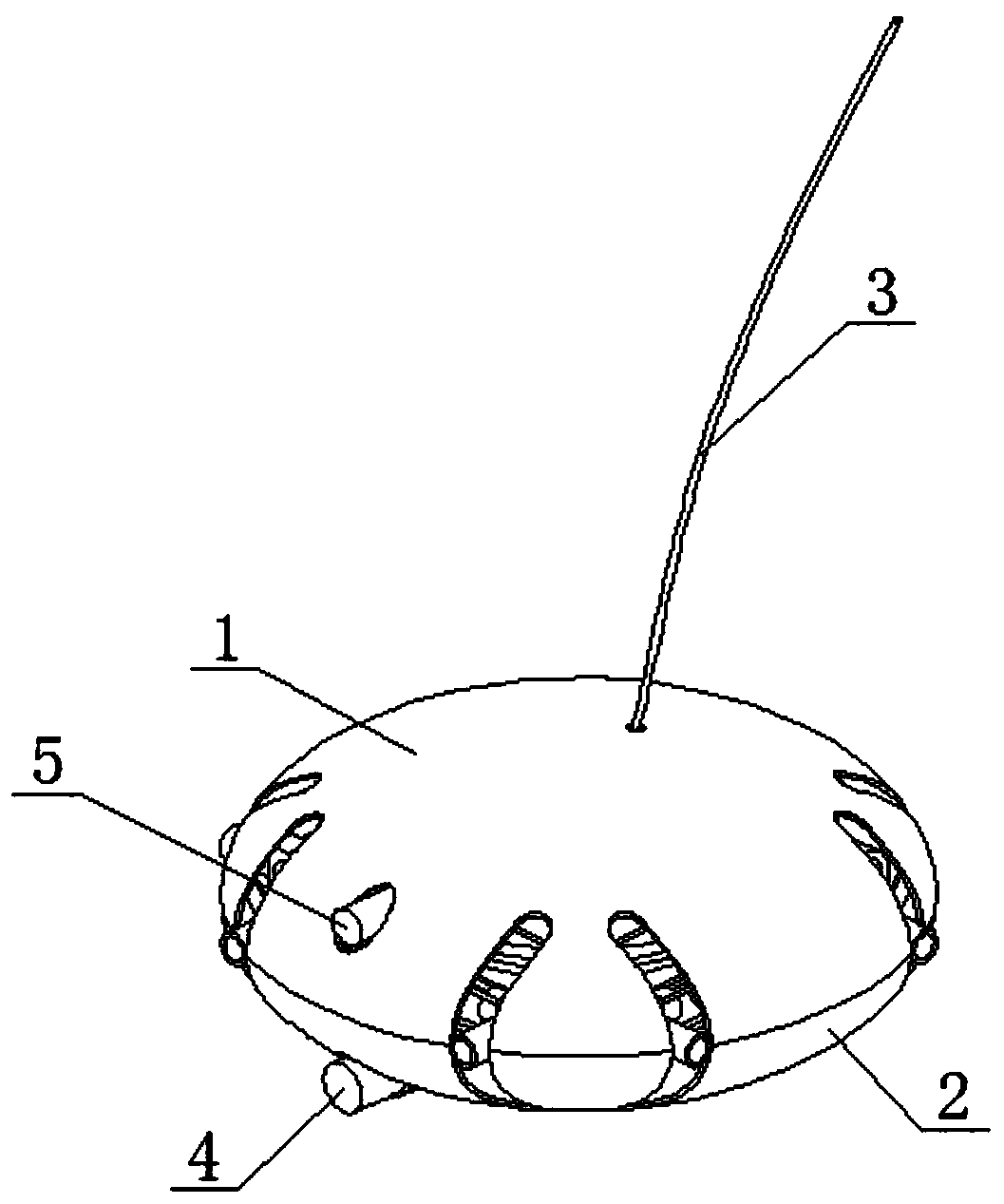
[0042] as attached figure 1 , the underwater robot adopts a dish-shaped light shell, specifically, it is divided into an upper light shell 1 and a lower light shell 2.
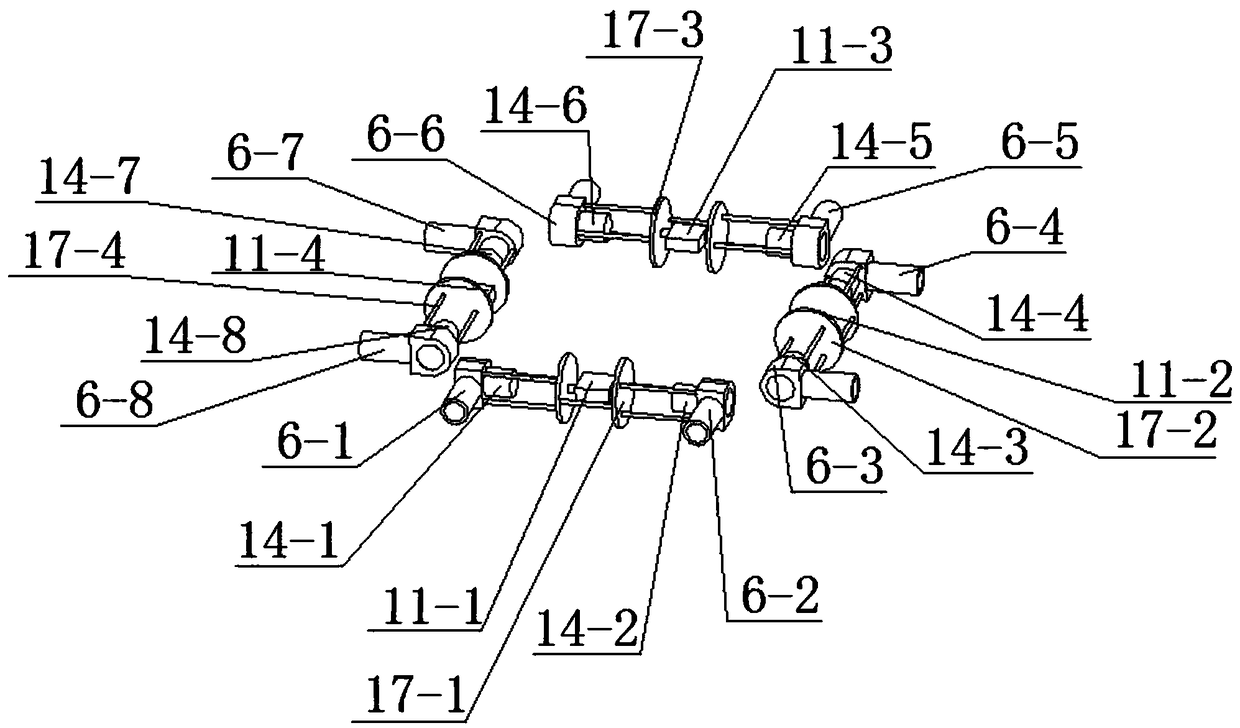
[0043] as attached figure 1 , the dish-shaped light shell of the underwater robot has grooves, and the grooves are the movement paths of the vector nozzles 6-1 to 6-8.
[0044] as attached figure 1 , the dish-shaped light shell of the underwater robot has a hole, and the hole is used to make the camera 4, the searchlight 5 and the optical fiber cable 3 pass through.
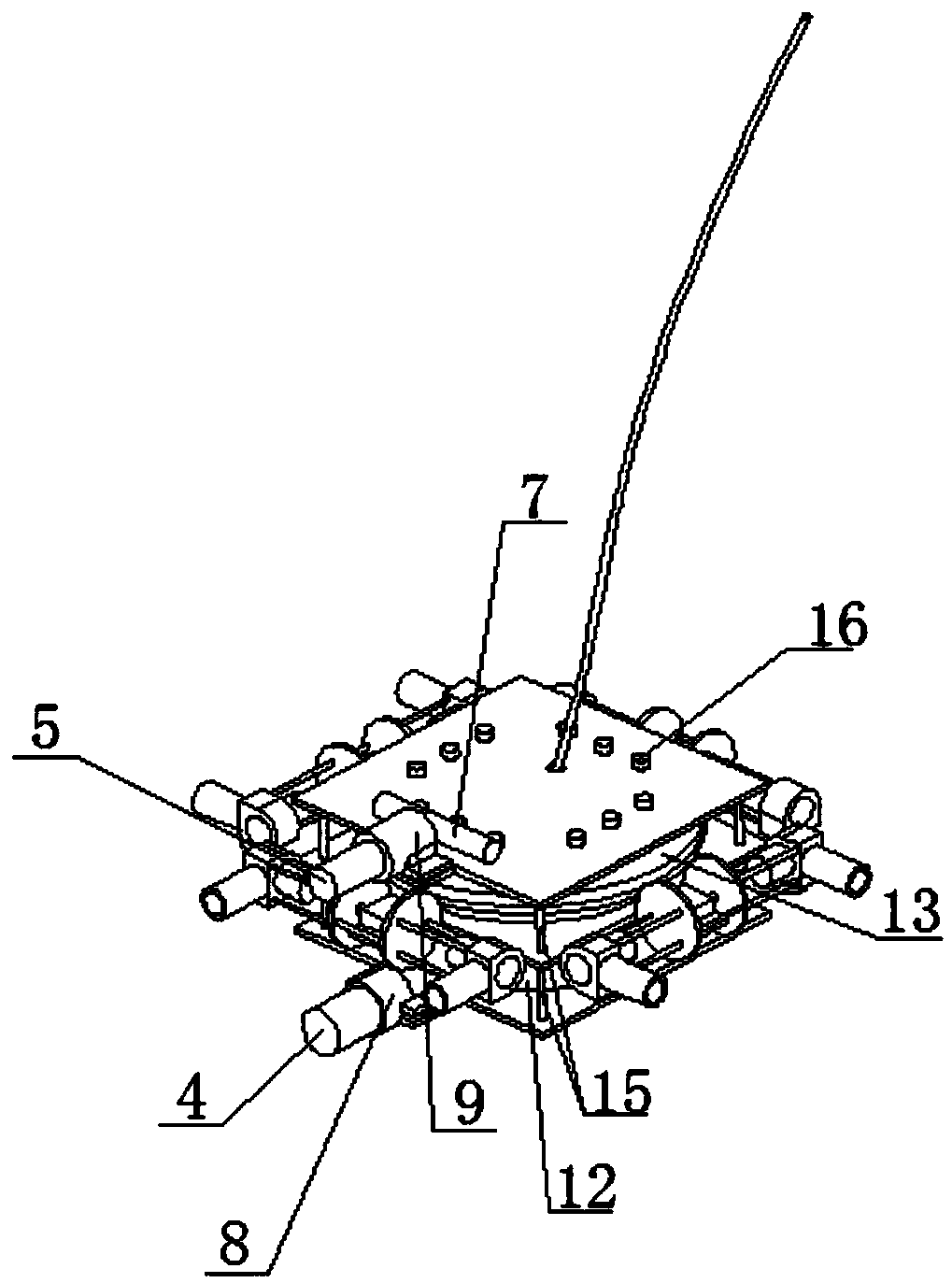
[0045] as attached Figure 4 , the pressure-resistant cabin cover 13 at the end of the pressure-resistant cabin 12 has a watertight joint 16, and the water-tight joint 16 is used to pass through relevant cables.
[0046] as attached Figure 4 , the support plate has three layers, the upper support plate 10-1 carries the searchlight 5 and the depth gauge 7, and leaves corresponding holes for the watertight joint 16 to pass through, and the mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More