

Autonomous vehicles with improved visual detection capabilities
A technology for autonomous vehicle and lane detection, applied in vehicle components, autonomous decision-making process as characteristics, vehicle position/route/height control, etc., to improve reconstruction accuracy, promote effective driving, and ensure pedestrian safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
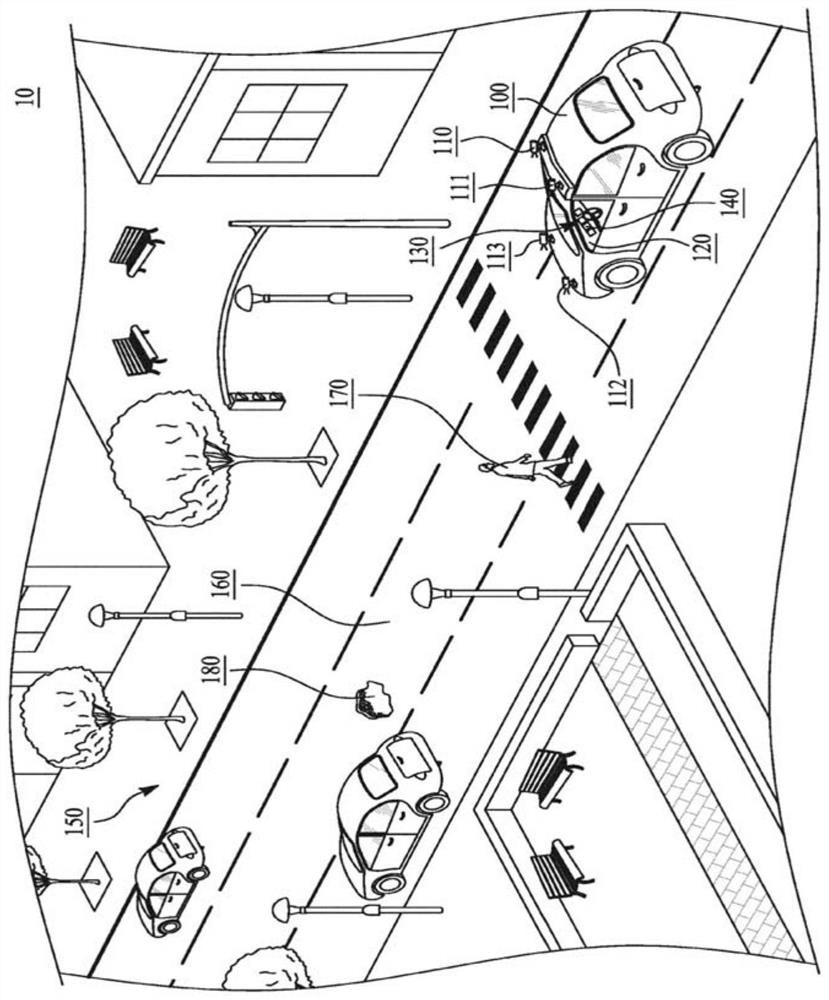
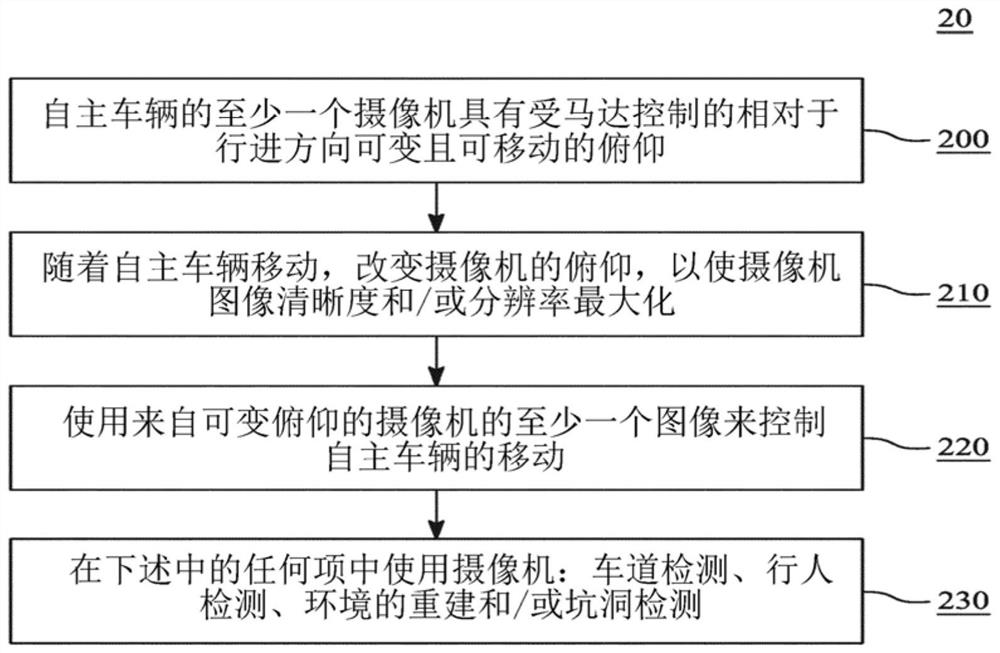
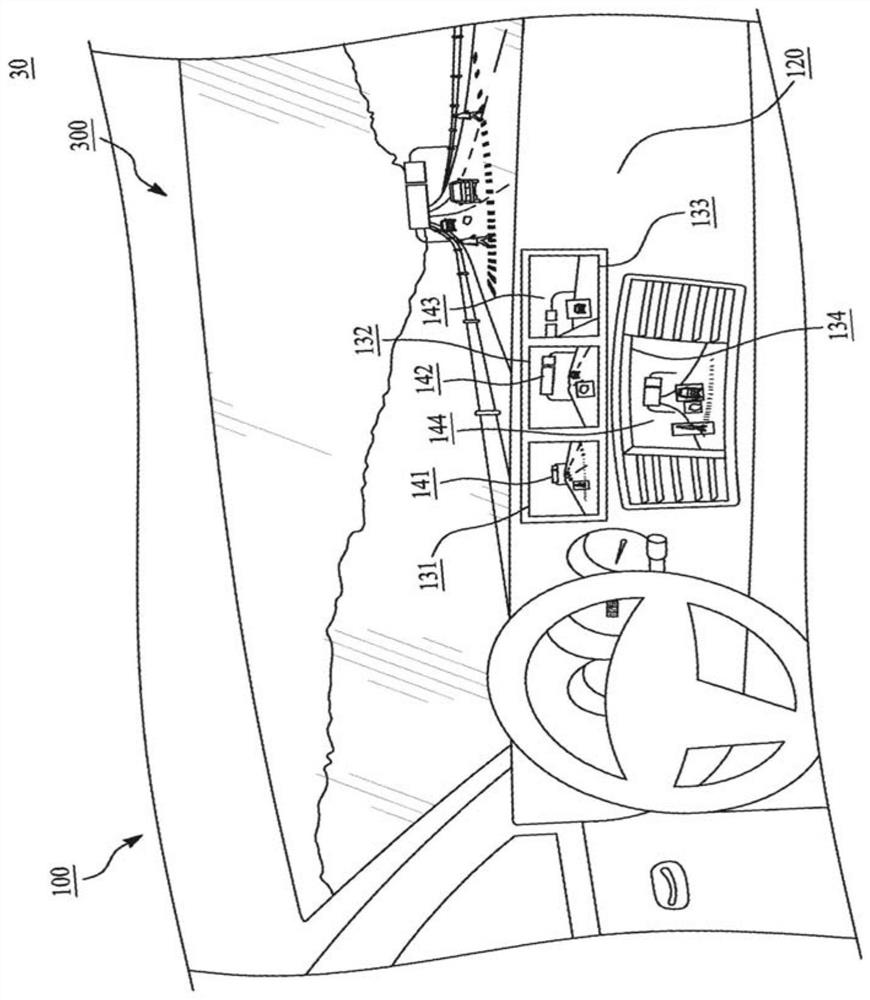
[0043] The present disclosure provides an autonomous vehicle including a vehicle camera alignment system, a method, and a software program product for improving the visual detection capabilities of the autonomous vehicle. The autonomous vehicle includes at least one variable pitch camera. A variable pitch camera has a variable and movable non-zero pitch that is adjustable in the direction of motion of the ego vehicle. Varying the pitch of the variable-tilt camera to maximize the image clarity and / or resolution of images captured by the variable-tilt camera to ensure accurate data is used to reconstruct objects and / or objects associated with the path of the autonomous vehicle surroundings. More accurate image reconstruction data is used to control the movement of the autonomous vehicle.
[0044] figure 1 Embodiment 10 of an autonomous vehicle 100 is shown. According to the present invention, the autonomous vehicle 100 includes a plurality of variable pitch cameras 110 , 111...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More