Braking force control method for emergency braking of unmanned vehicles on dry roads
A technology of unmanned vehicles and emergency braking, which is applied in the field of road engineering and vehicle engineering, can solve problems such as lack of anti-lock braking, failure to consider the situation of skidding and locking, ignoring the safety factors of anti-lock braking, etc., to achieve high reliability, simple and fast calculation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
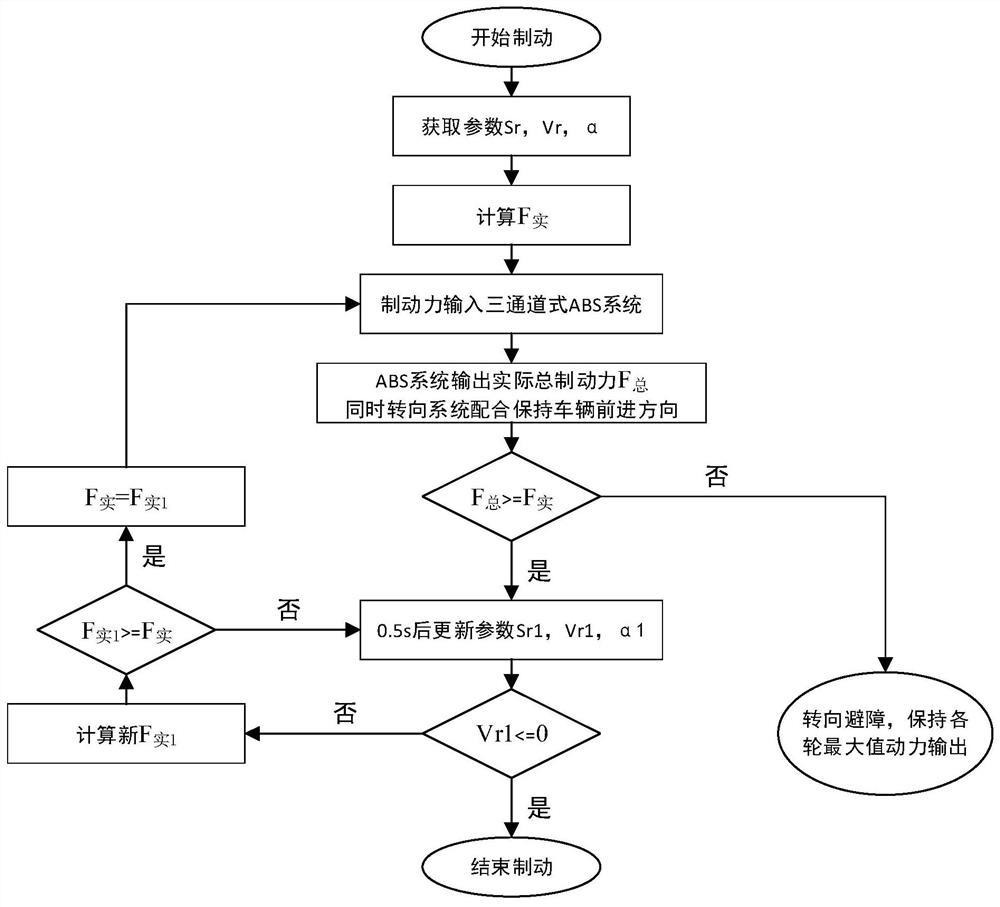
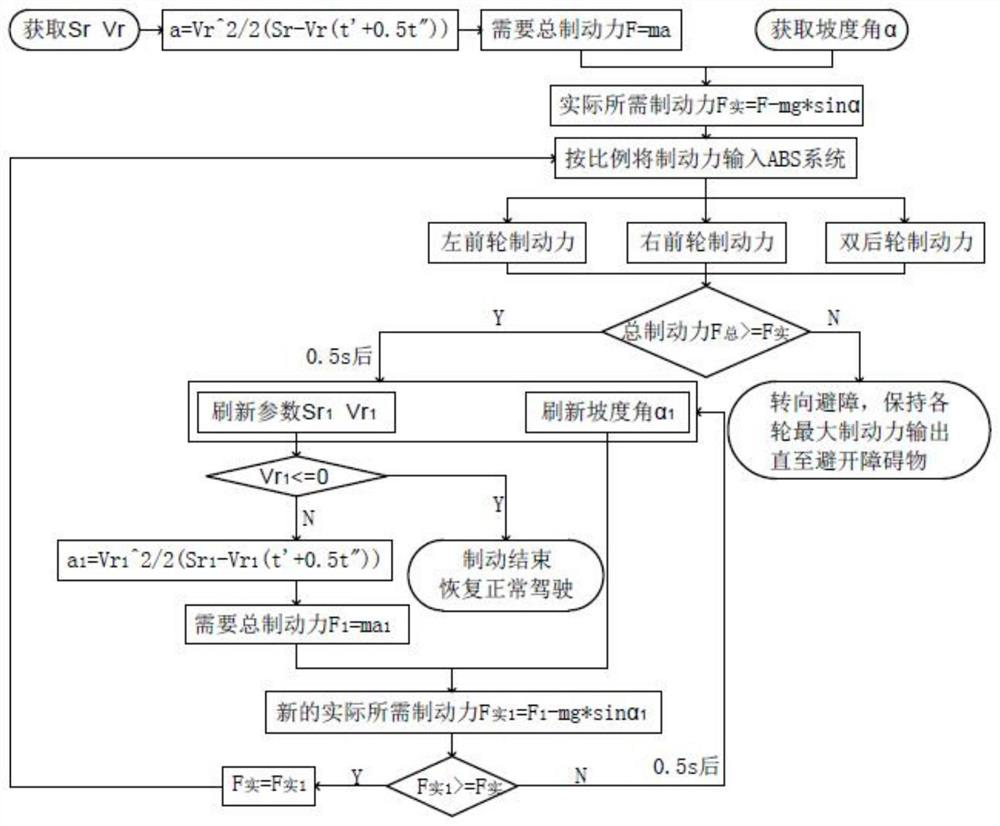
[0023] The braking force control method for emergency braking of an unmanned vehicle on a dry road according to the present invention, the overall method flow is shown in the appendix of the description figure 1 As shown, the detailed control process is shown in the appendix of the manual figure 2 shown. The following combination figure 2 , to illustrate the operation process of the braking force control method for emergency braking of an unmanned vehicle on a dry road.
[0024] (1) The driving control computer ECU instructs the on-board sensor to obtain the input parameters of the corresponding method
[0025] The driving control computer ECU commands the ranging sensor and the vehicle-mounted meter-wave radar to locate and determine obstacles, and obtains the relative distance Sr and relative speed Vr between the vehicl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More