

Autonomous control method for fixed point landing of shipboard unmanned aerial vehicle
A control method and autonomous control technology, applied in the field of aviation flight control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
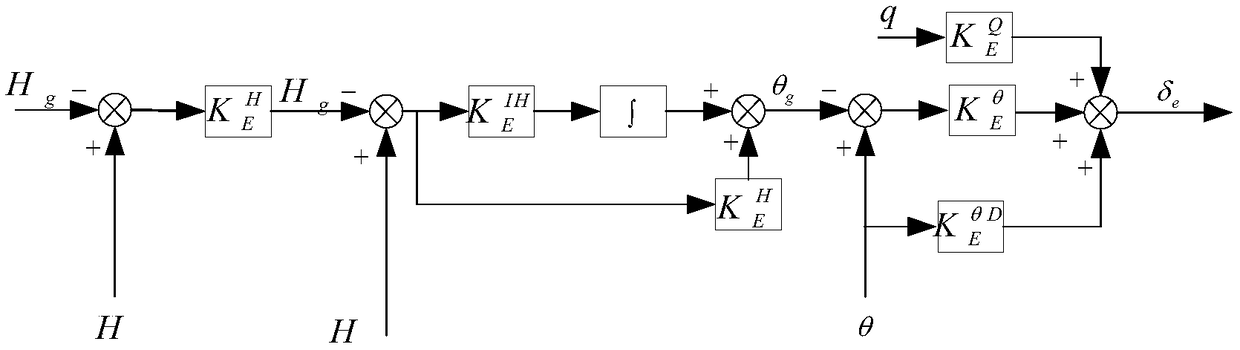
[0105] An autonomous control method for fixed-point landing of a ship-borne unmanned aerial vehicle, characterized in that: it includes a control method for a height guidance section, a control method for a two-dimensional guidance section, and a control method for a terminal guidance section; During the entire landing process, first enter the altitude guidance section, track the glide trajectory through the control method of the altitude guidance section, and perform rough trajectory adjustment; enter the two-dimensional guidance section at a height of 200m relative to the airport, and pass the control method of the two-dimensional guidance section The method realizes the precise tracking of the trajectory; when the relative height of the airport is 15m, it enters the terminal guidance section, and through the control method of the terminal guidance section, the nose of the UAV is aligned with the centerline of the runway when it lands.
[0106] The control method of the altit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More