A method and a system for controlling a robot portrait
A technology of robots and portraits, applied in the generation of 2D images, instruments, manipulators, etc., can solve problems such as inability to draw colorful pictures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
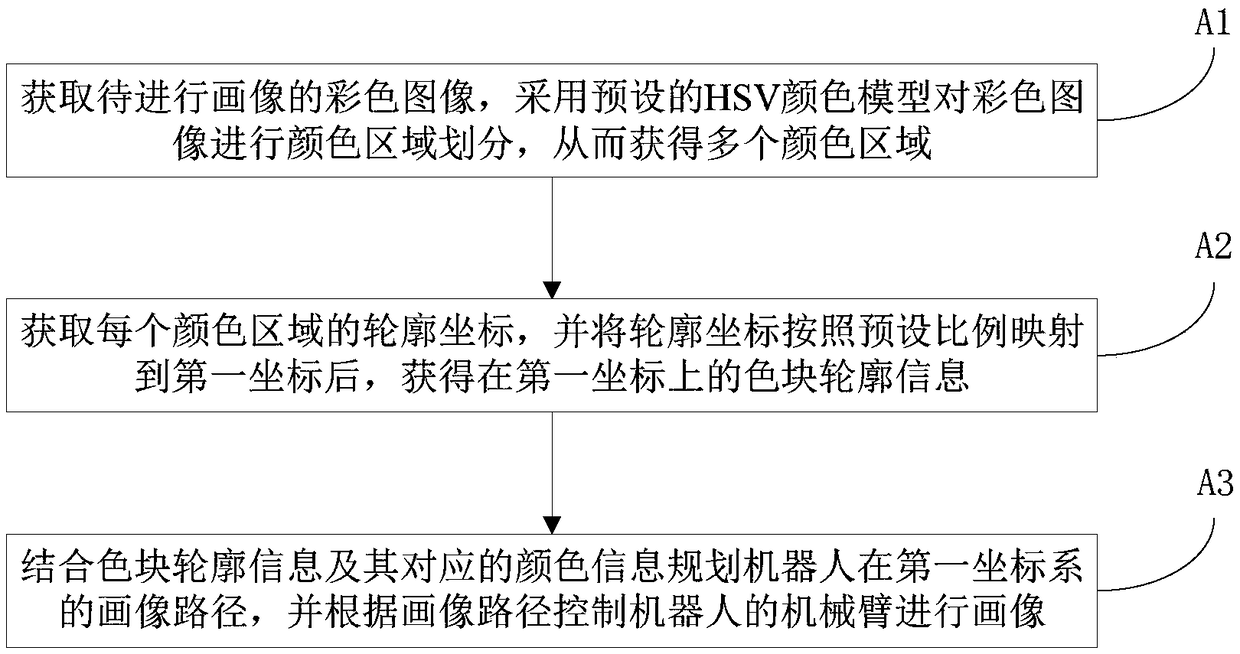
[0047] like figure 1 As shown, a method for controlling a robot portrait comprises the following steps:
[0048] A1. Acquire the color image to be drawn, and use the preset HSV color model to divide the color image into color regions, so as to obtain multiple color regions.
[0049] Wherein, the preset HSV color model is an HSV color space including a plurality of color subspaces, specifically obtained through the following steps:
[0050] Perform color space division processing on the HSV color space according to the hue to obtain multiple color subspaces; wherein, each color subspace corresponds to a hue.
[0051] The HSV (Hue, Saturation, Value) color space is a method for determining a color according to three basic attributes of the color: hue (Hue), saturation (Saturation) and lightness (Value). The model of the HSV color space corresponds to a conical subset in the cylindrical coordinate system. The circular bottom of the cone is equivalent to the hue, the saturation ...
Embodiment 2
[0084] On the basis of Embodiment 1, step S1 also includes the following steps:
[0085] Determine whether the brightness of the pixel is greater than the preset value, and if so, directly assign the brightness of the pixel to 1.
[0086] When the lightness of the pixel value in the image is greater than the preset value, it means that the color is dark, and the lightness of the pixel is directly assigned a value of 1 and represented by black. The preset value may be 0.5˜0.9, and in this embodiment, the preset value is 0.8. The lightness is processed by the above method to make the image more tense and more realistic.
Embodiment 3
[0088] refer to Figure 4 , a system for controlling robot portraits, including a division module, a mapping module and a control module;
[0089] The division module is used to obtain the color image to be drawn, and uses the preset HSV color model to divide the color image into color regions, thereby obtaining multiple color regions;
[0090] The mapping module is used to obtain the contour coordinates of each color area, and after mapping the contour coordinates to the first coordinate system according to a preset ratio, obtain the color block contour information on the first coordinate system;
[0091] The control module is used to combine the outline information of the color block and the color information of the color area to plan the portrait path of the robot in the first coordinate system, and control the robotic arm of the robot to perform portrait according to the portrait path.
[0092] The above system divides the color image through the HSV color model to obtain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More