

Flexible positioning device for navigation for robot surgery under X-ray and navigation method for robot surgery under X-ray
A robotic surgery and flexible positioning technology, applied in surgical navigation systems, surgical robots, surgery, etc., can solve the problems of inability to update large areas, lack of flexibility in rigid connections, and inability to consider the impact of surgery, reducing the number of X-ray exposures , the effect of reducing workload and reducing injuries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
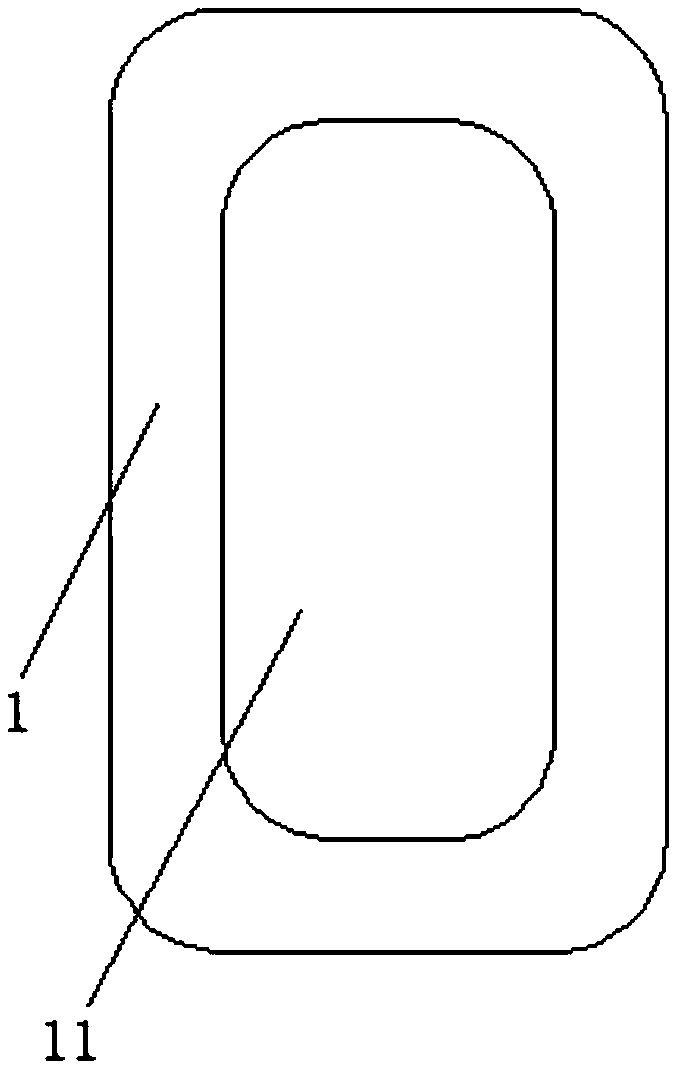
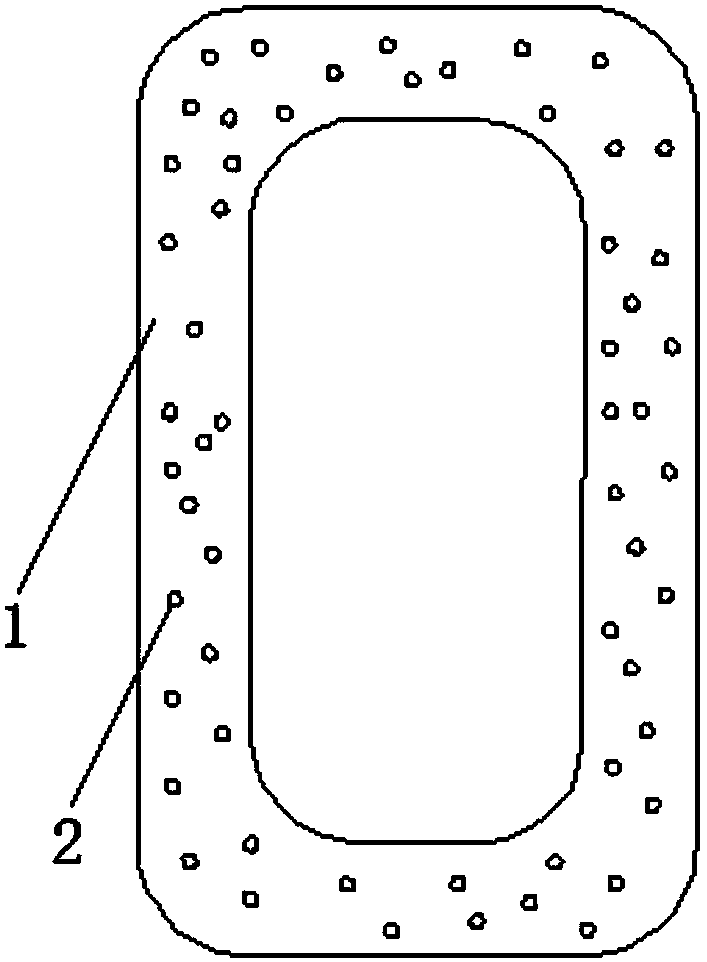
[0038] The flexible non-invasive positioning device provided in this example includes a flexible sheet 1 and several metal markers 2 that are developed under X-rays and recognized by infrared equipment, wherein the flexible sheet 1 is provided with a positioning window 11, and several metal markers 2 are positioned around The windows 11 are asymmetrically and evenly distributed on the flexible sheet 1. When the flexible sheet 1 is fixed on the patient's body surface around the patient's surgical site through the positioning window 11, the spatial positions of several metal markers 2 reflect the space of the surgical site. Location.
[0039] This example does not specifically limit the shape of the flexible sheet 1, that is, the shape of the flexible sheet 1 can be any regular or irregular shape, and because the structures of various parts of the human body are different, correspondingly, the size and shape of the positioning window 11 are not limited. Specifically defined, the...
Embodiment 2
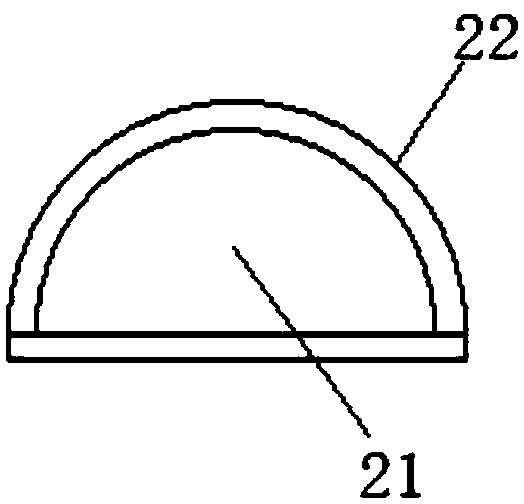
[0050] Based on Example 1, this example provides another metal marker 2 with a structure, such as Figure 4 As shown, the metal marker 2 of this example is a spherical metal reflective ball, in order to match the spherical metal reflective ball pasted on the flexible sheet 1, this example also includes a support 3, the support 3 of this example can be It is made of plastic, or it can be made of metal that can be developed under X-rays. The metal reflective ball metal marker 2 is fixed on the top of the support 3 , and the bottom of the support 3 is pasted on the flexible sheet 1 .
[0051] In this example, the installation method of the metal reflective ball and the supporting part 3 is as follows: the metal reflective ball is provided with a threaded hole, the supporting part of the supporting part 3 is conical, and the supporting part 3 is provided with a threaded hole at the tip of the supporting part. The matching screw, the metal reflective ball is screwed to the screw of...
Embodiment 3
[0055] Based on Embodiment 1 and Embodiment 2, this example provides a navigation method suitable for robot surgery under X-ray, which is specifically implemented through the following steps.
[0056] S1: Fix the flexible positioning device of Embodiment 1 or Embodiment 2 on the patient's body surface around the patient's surgical site through the positioning window.
[0057] S2: The flexible positioning device is photographed at the same time by X-ray equipment and infrared equipment to obtain plane X-ray images and infrared images.
[0058] S3: Transform the coordinates of the metal markers in the planar X-ray image and the infrared image into the local coordinate system of the flexible positioning device, and establish the coordinates of the metal marker in the planar X-ray image and the infrared image in the local coordinate system The relative relationship of the coordinates of the metal markers.
[0059] Since the flexible positioning device itself has a coordinate syst...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More