

Main operating arm for minimally invasive surgery
A minimally invasive surgery and main operation technology, applied in the field of minimally invasive surgery main manipulator and medical equipment, can solve the problems of complex operation of surgical tools, uncoordinated eye-hand movement, and affecting the quality of surgery, so as to ensure the quality of surgery and reduce the cost of surgery. Cost, effect of reducing surgical fatigue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Referring to the accompanying drawings, the present invention will be further described in detail with specific embodiments.
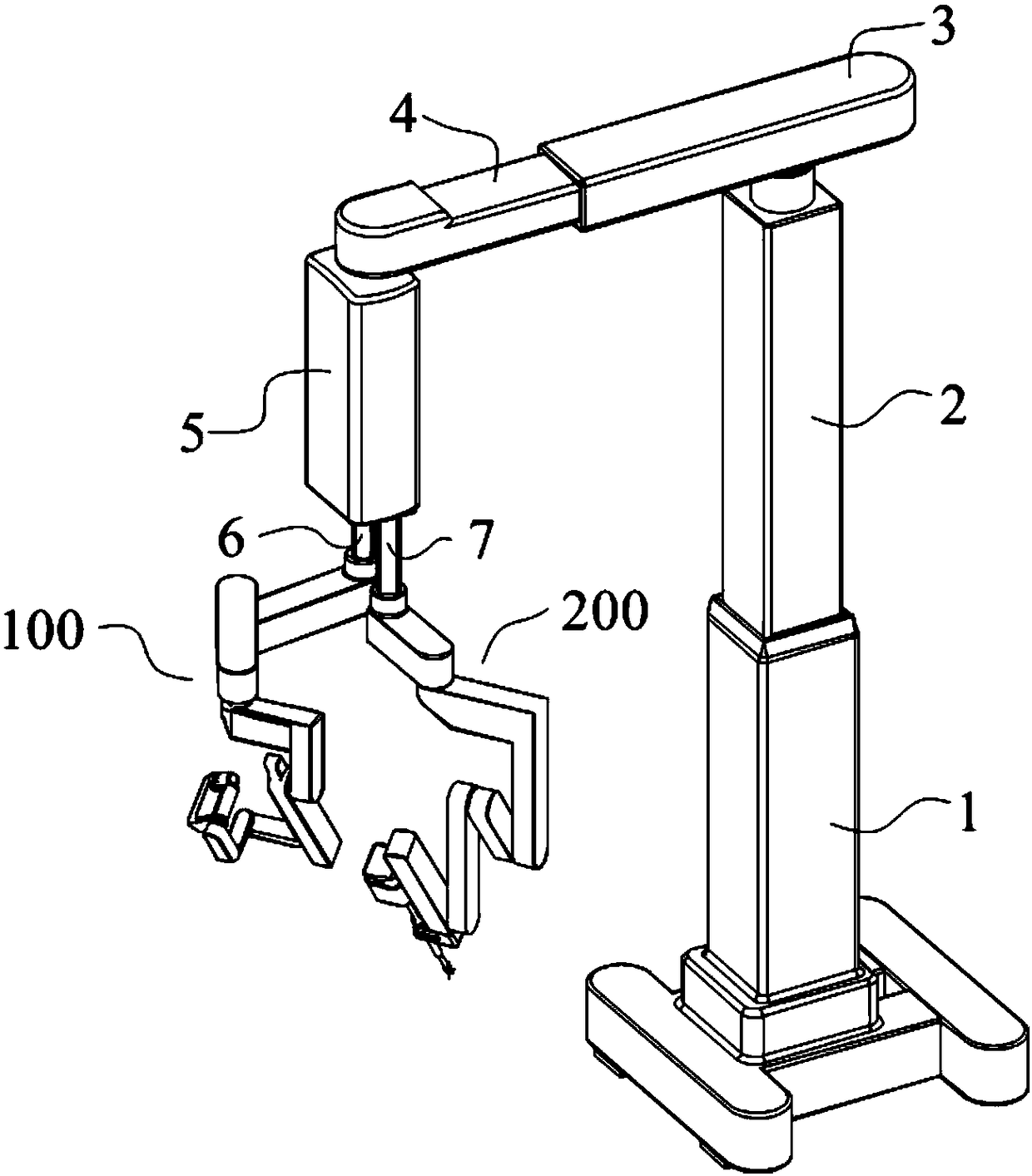
[0053] Such as figure 1 As shown, the minimally invasive surgical instrument auxiliary system includes a base 1, a column 2 that can be raised and lowered on the base 1, a beam 3 that is connected to the column 2 in rotation, and a telescopic rod 4 that can move horizontally on the beam 3 and rotate through the rotary joint. The lifting seat 5 installed at the end of the telescopic rod 4, and the main end sliding bar 6 and the slave end sliding bar 7 that can realize the lifting movement on the lifting seat 5, the doctor's operation end 100 is fixedly connected to the end of the main end sliding bar 6, The instrument operating end 200 of the present invention is fixedly connected to the end of the sliding rod 7 at the slave end.
[0054] The lifting movement of the column 2 on the base 1 is an active movement, and hydraulic or motor-driven scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More