

Chan-weighted centroid indoor positioning method based on Kalman filter
A Kalman filter and Kalman filter technology, applied in positioning, radio wave measurement systems, measurement devices, etc., can solve the problems of increased measurement errors, divergent results, and decreased positioning accuracy of chan algorithm, to offset the impact of errors , Improve the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0034] The present invention provides a chan-weighted intra-mass positioning method based on Kalman filtering, which is implemented according to the following steps:
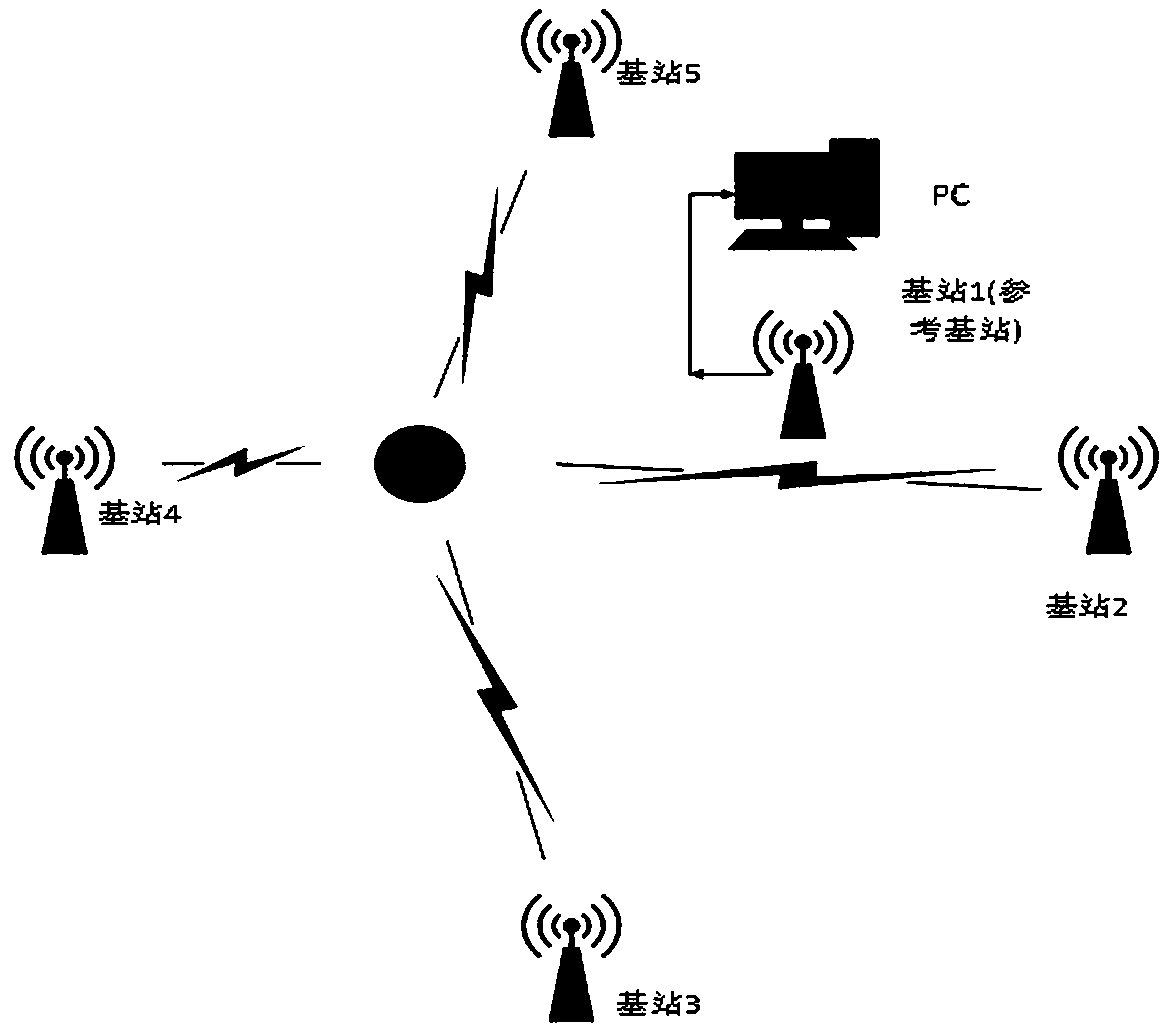
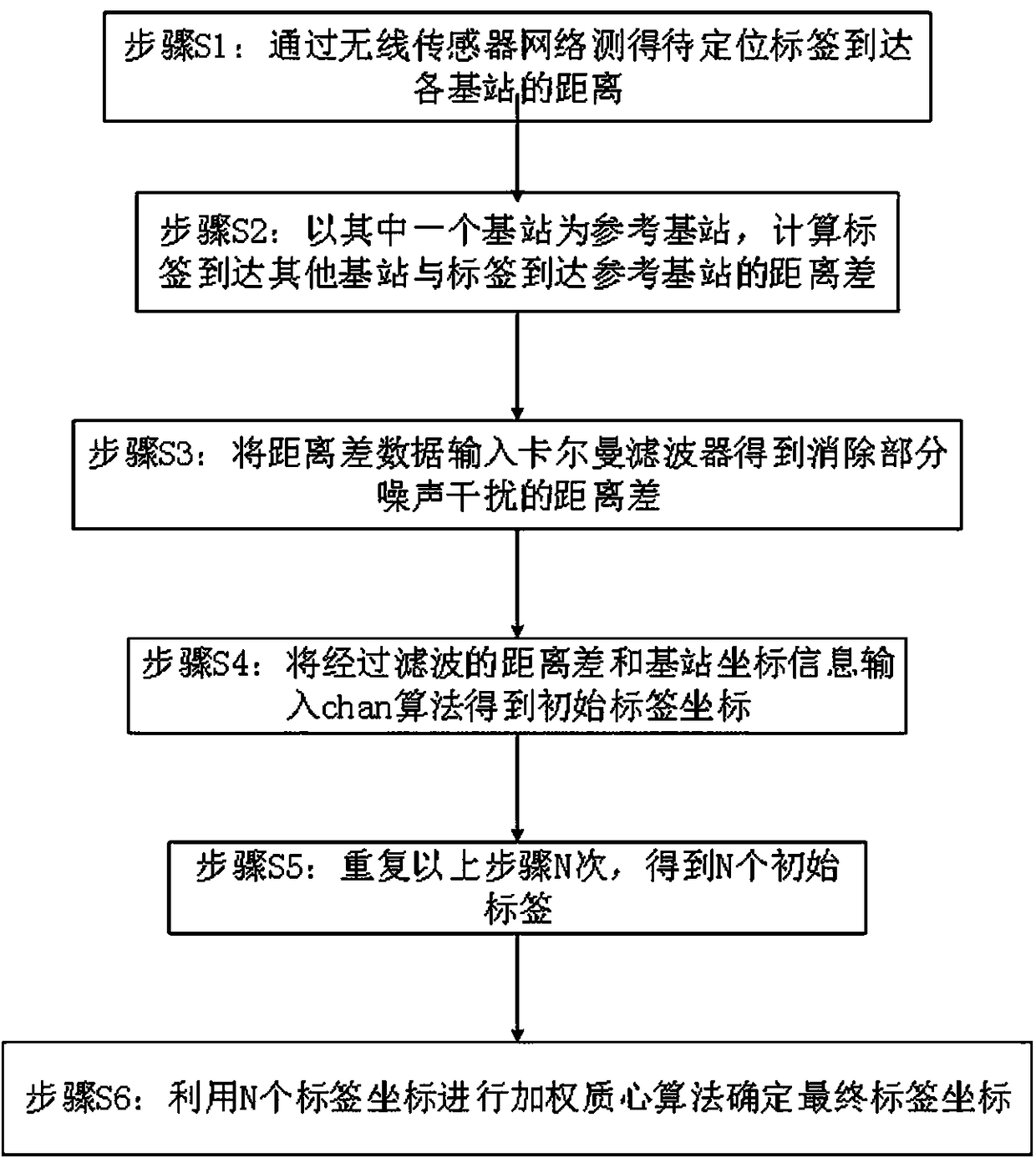
[0035] Step S1: Measure the distance between the tag to be located and each base station through the wireless sensor network;
[0036] Step S2: Using one of the base stations as a reference base station, calculate the distance difference between the tag to be located and other base stations and the tag to be located from the reference base station;
[0037] Step S3: Input the distance difference data into the Kalman filter for filtering, and obtain the distance difference that eliminates part of the noise interference;
[0038] Step S4: Input the filtered distance difference and base station coordinate information into the chan algorithm model to obtain the initial label c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More