

Power exoskeleton control method, device, computer device and storage medium
A technology of a control method and a control device, which is applied in the field of computer equipment and storage media, power exoskeleton control methods, and devices, and can solve problems such as not being able to cooperate well with user actions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
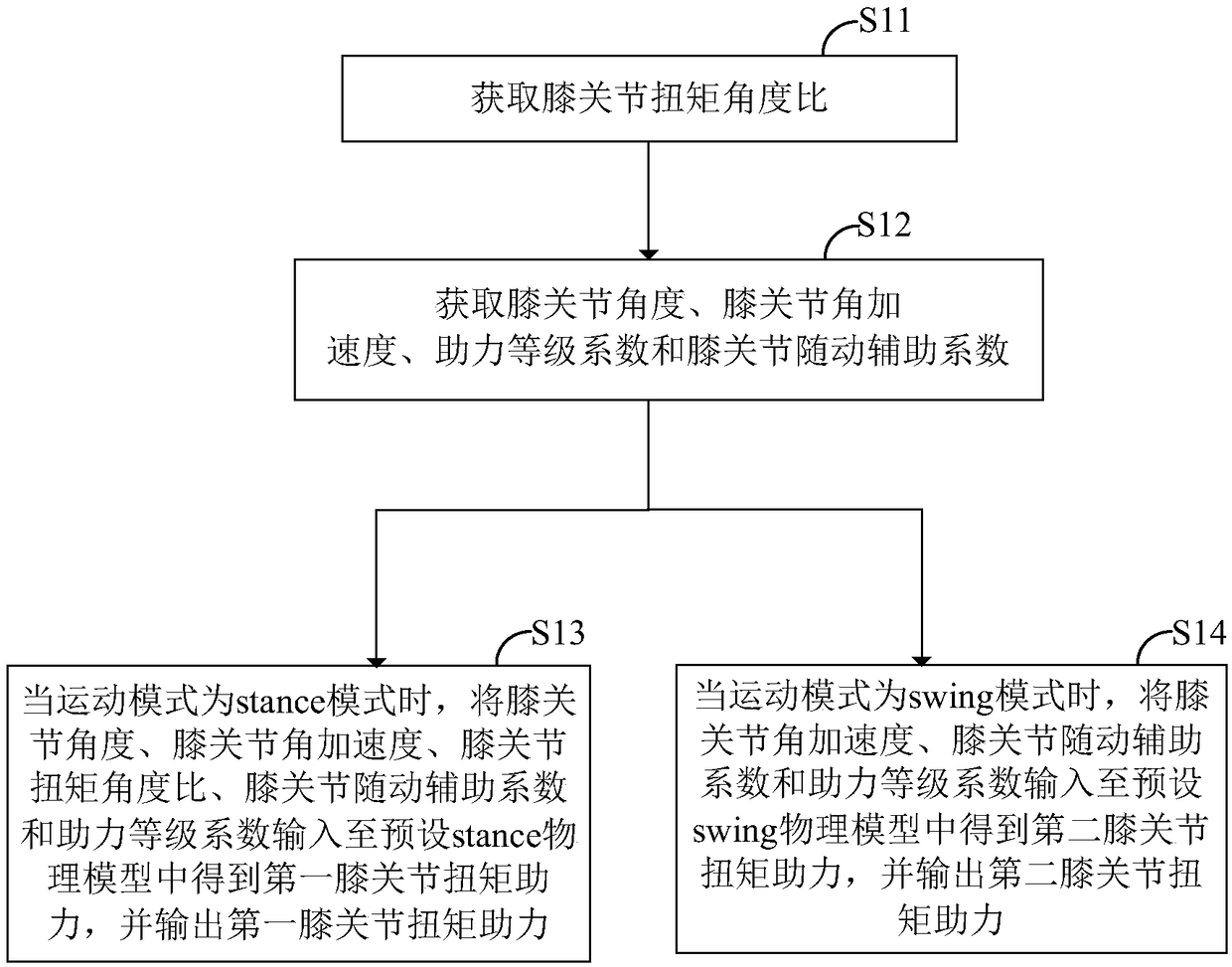
[0030] An embodiment of the present invention provides a power exoskeleton control method, such as figure 1 As shown, the powered exoskeleton control method includes:
[0031] Step S11, obtain the knee joint torque angle ratio k 1m .
[0032] In step S11, the knee joint torque angle ratio can be obtained through the user data. The user data refers to the historical data of the user's normal walking. Historical data, the historical data may include the change trend of the knee joint angle θ, the knee joint angle Change trend and knee joint torque τ change trend within a preset time period, knee joint torque angle ratio k 1m is a value calculated from the knee joint angle θ and the knee joint torque τ of the user history measured at the same time.
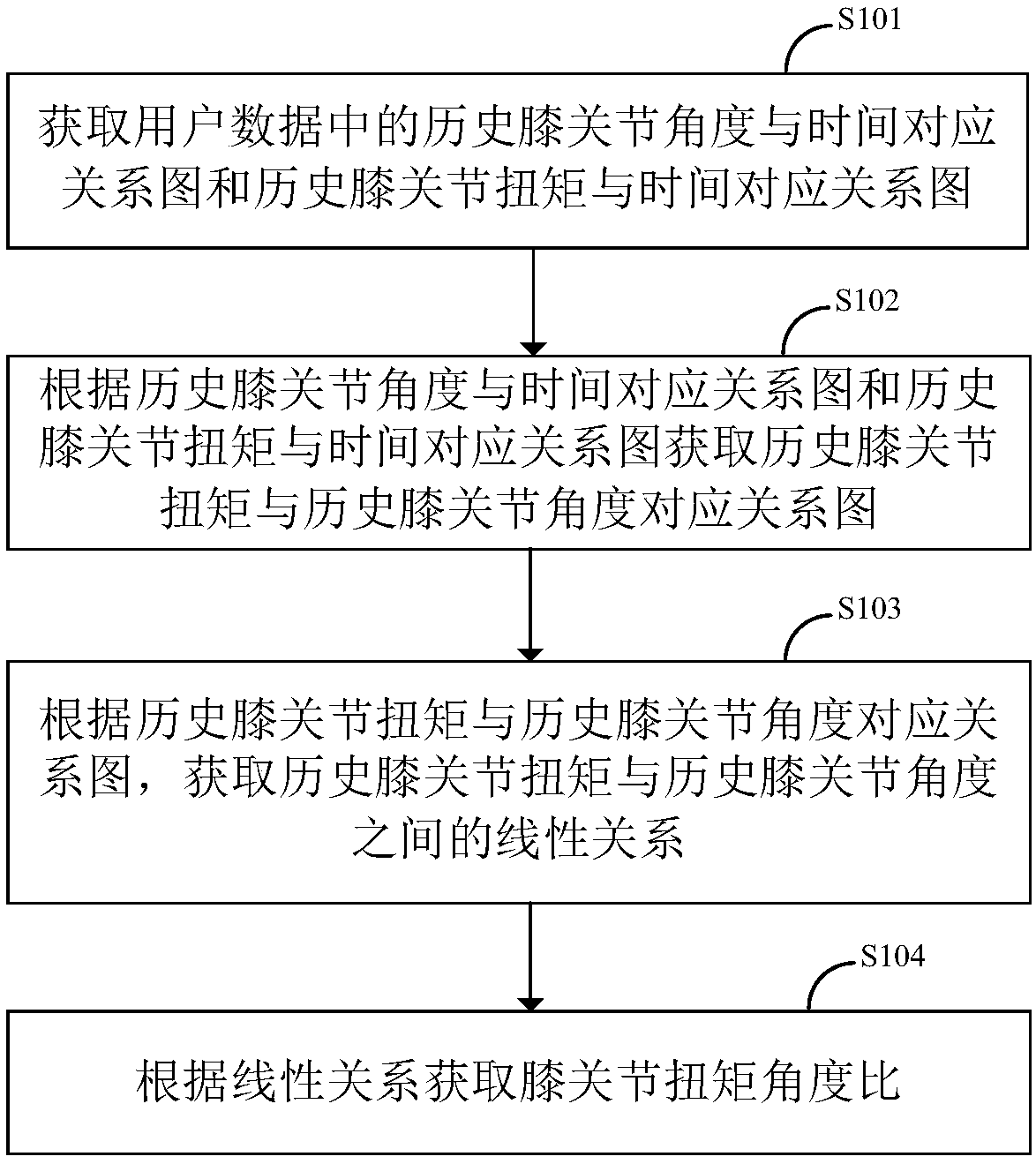
[0033] Wherein, the "acquisition of knee joint torque angle ratio k 1m ",Specifically:
[0034] Obtain the historical knee joint angle θ and historical knee joint torque τ in the user data;
[0035] Obtain the knee joint torq...
Embodiment 2
[0075] Embodiment 2 of the present invention provides a powered exoskeleton control method device 4, such as Figure 8 As shown, the power exoskeleton control method device includes:
[0076] The first information acquisition module 41 is used to acquire the knee joint torque angle ratio k 1m ;
[0077] The second information acquisition module 42 is used to acquire the user's current knee joint angle θ k , Knee joint angular acceleration Power level coefficient k f and knee joint follow-up assist coefficient k 2m ;
[0078] Calculation module 43, is used for when walking cycle is stance state, described knee joint angle θ k , the angular acceleration of the knee joint The knee joint torque angle ratio k 1m , the knee joint follow-up auxiliary coefficient k 2m and the boost rating coefficient k f Input to the preset stance physical model to get the first knee joint torque assist τ' stance , and outputs the first knee torque boost τ' stance ; and for when the walk...
Embodiment 3
[0088] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the computer program is executed by a processor, the power exoskeleton control method in Embodiment 1 is implemented. In order to avoid repetition, details are not repeated here. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More