

Horizontal joint four-axis robot
A four-axis robot and horizontal joint technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of small arm rotation angle, difficult to pass through narrow spaces, large arm and small arm thickness, etc., to achieve large arm and small arm. The arm is flexible, stable adsorption, and the effect of small thickness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and embodiment, further elaborate the present invention.
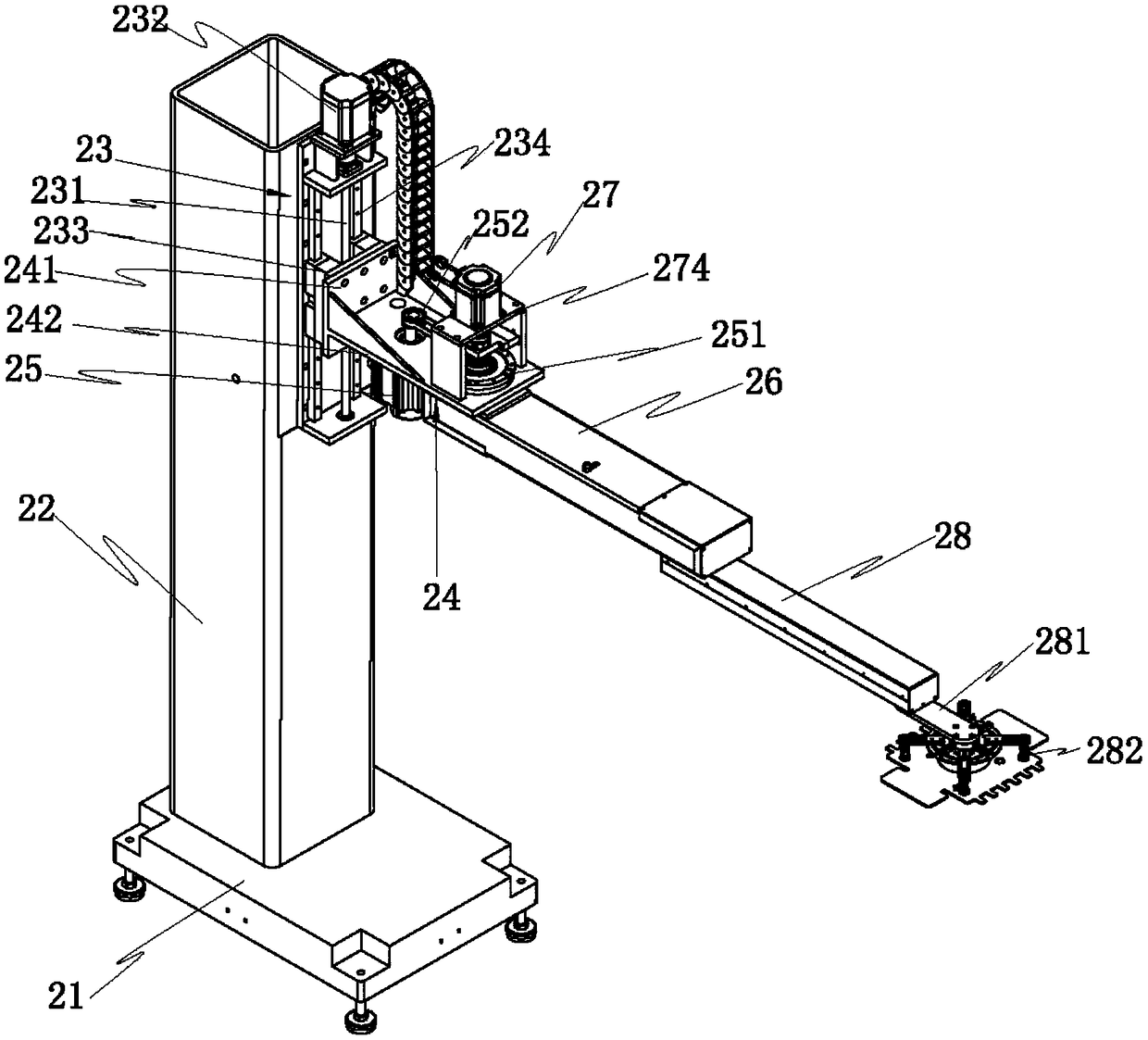
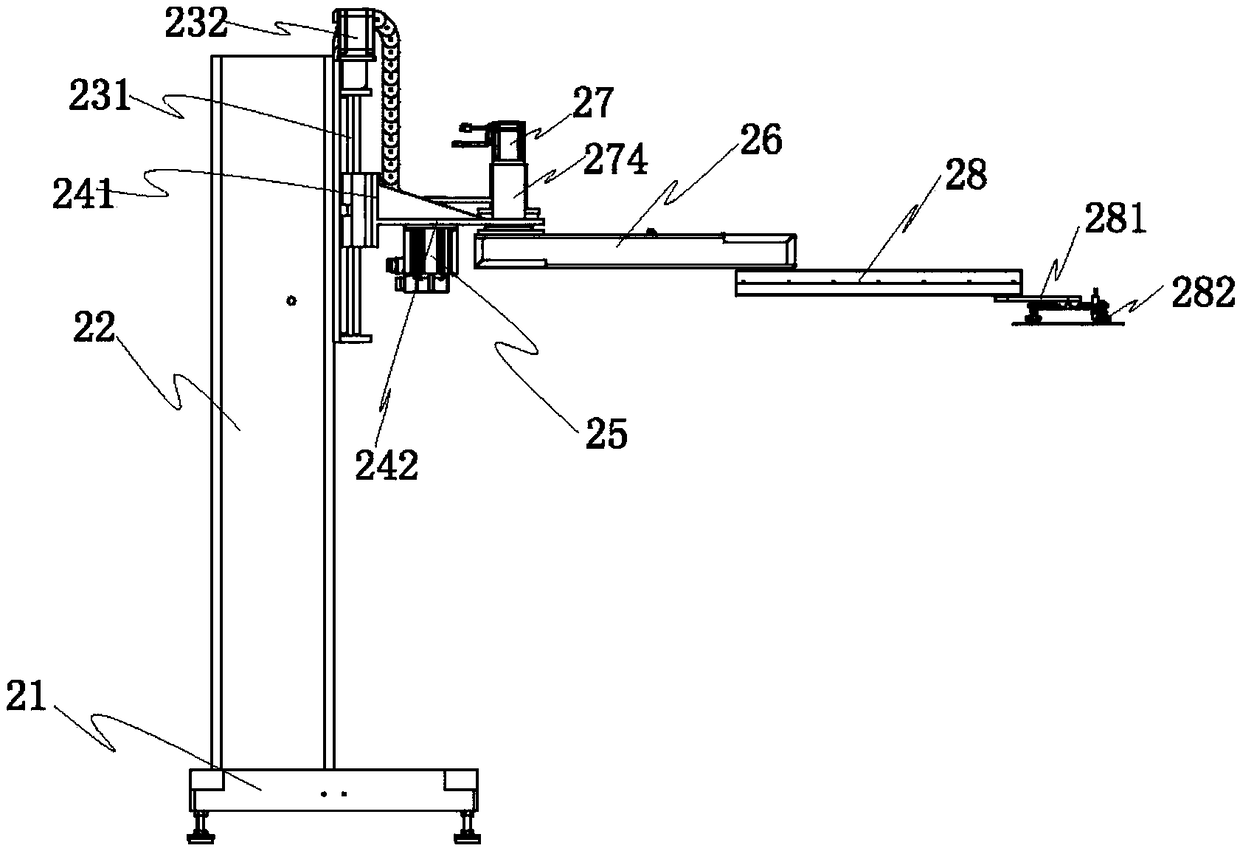
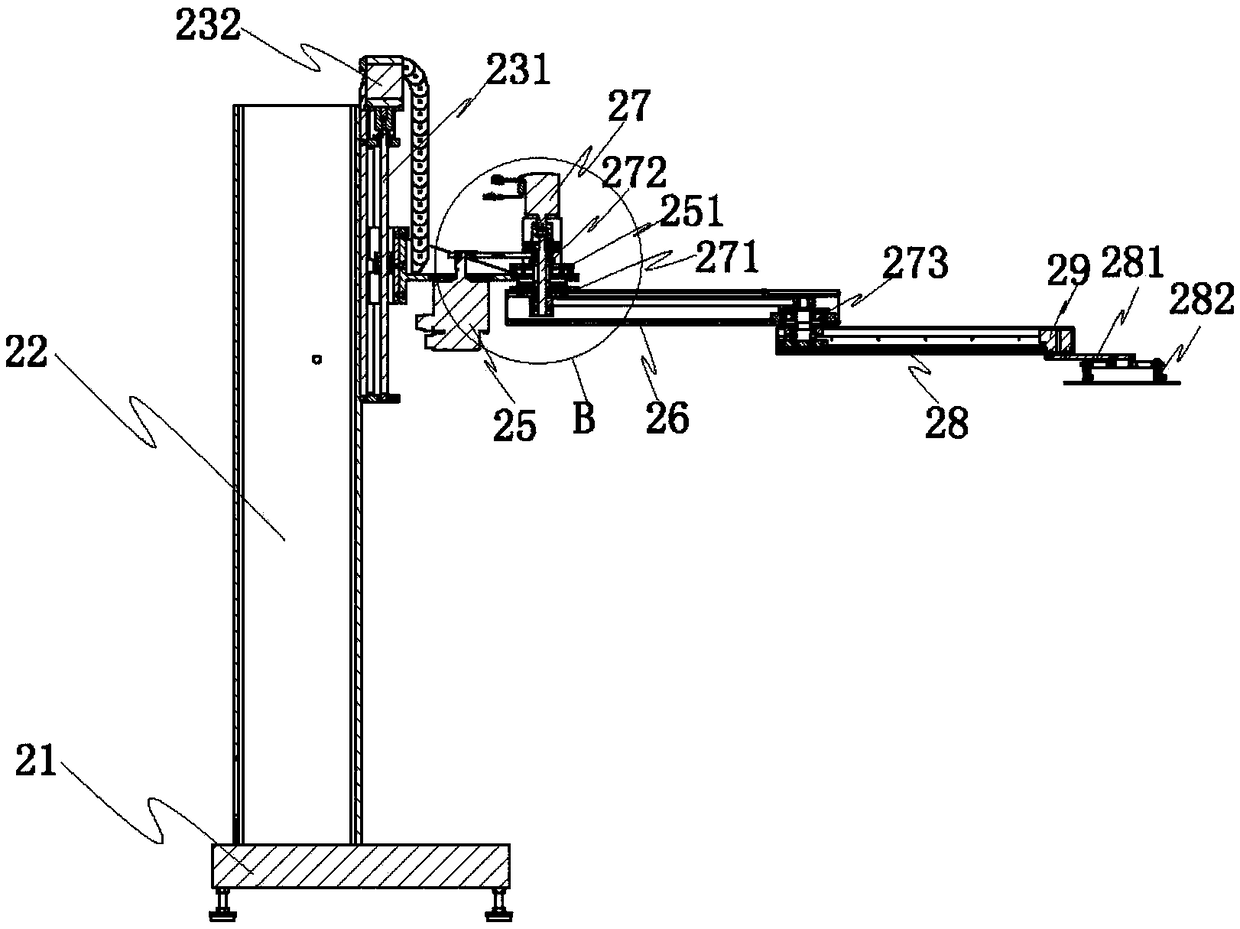
[0028] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, the horizontally jointed four-axis robot 2 includes a base 21, a stand 22 is fixed on the base 21, a lifting module 23 is provided on the stand 22, a fixed frame 24 is provided on the lifting module 23, and the lifting module 23 is used Drive the fixed frame 24 to move up and down, the bottom of the fixed frame 24 is connected with a hollow boom 26 through the first joint, the boom 26 is driven by the first power device 25 to rotate with the first joint as the axis, the bottom of the boom 26 A forearm 28 is connected through the second joint, and the forearm 28 is driven by the second power unit 27 to rotate with the second joint as the axis. A tooling frame 281 driven by the third power unit 29 is arranged below the forearm 28 , the tooling frame 281 is provided with a tooling fixture 282, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More