Mobile robot, working surface recognizing method and control method
A mobile robot and work surface technology, applied in the field of mobile robots, can solve the problems of high implementation cost, complex solutions, detection errors, etc., and achieve the effect of high recognition accuracy and low implementation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] The mobile robot in this embodiment is described by taking a sweeping robot as an example.
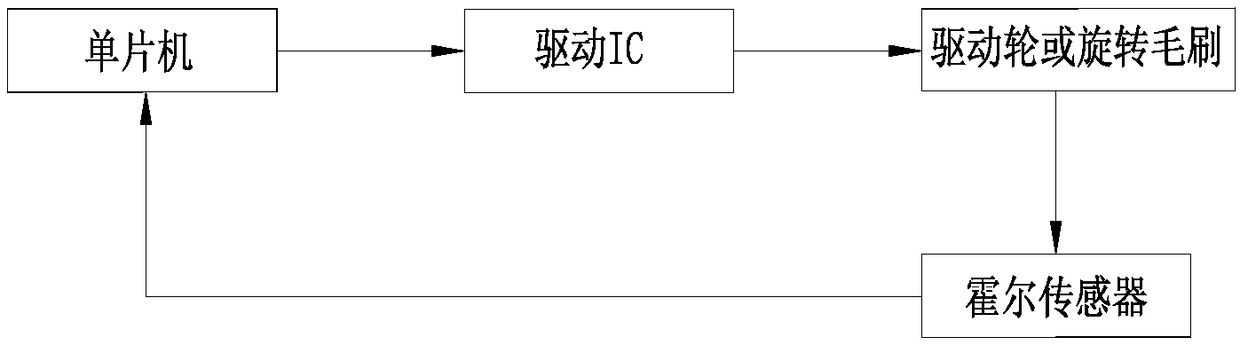
[0024] Such as figure 1 As shown, the sweeping robot in this embodiment includes a rotating device, an acquisition module, a storage module and a judgment module. Specifically, the rotating device in this embodiment is the left and right driving wheels; the acquisition module includes a Hall sensor for obtaining the speed of the driving wheel and a single-chip microcomputer for obtaining the duty ratio of the driving wheel; the storage module is the memory of the single-chip microcomputer of the sweeping robot; the judgment module It is a single-chip microcomputer; the driving module is a driving IC.
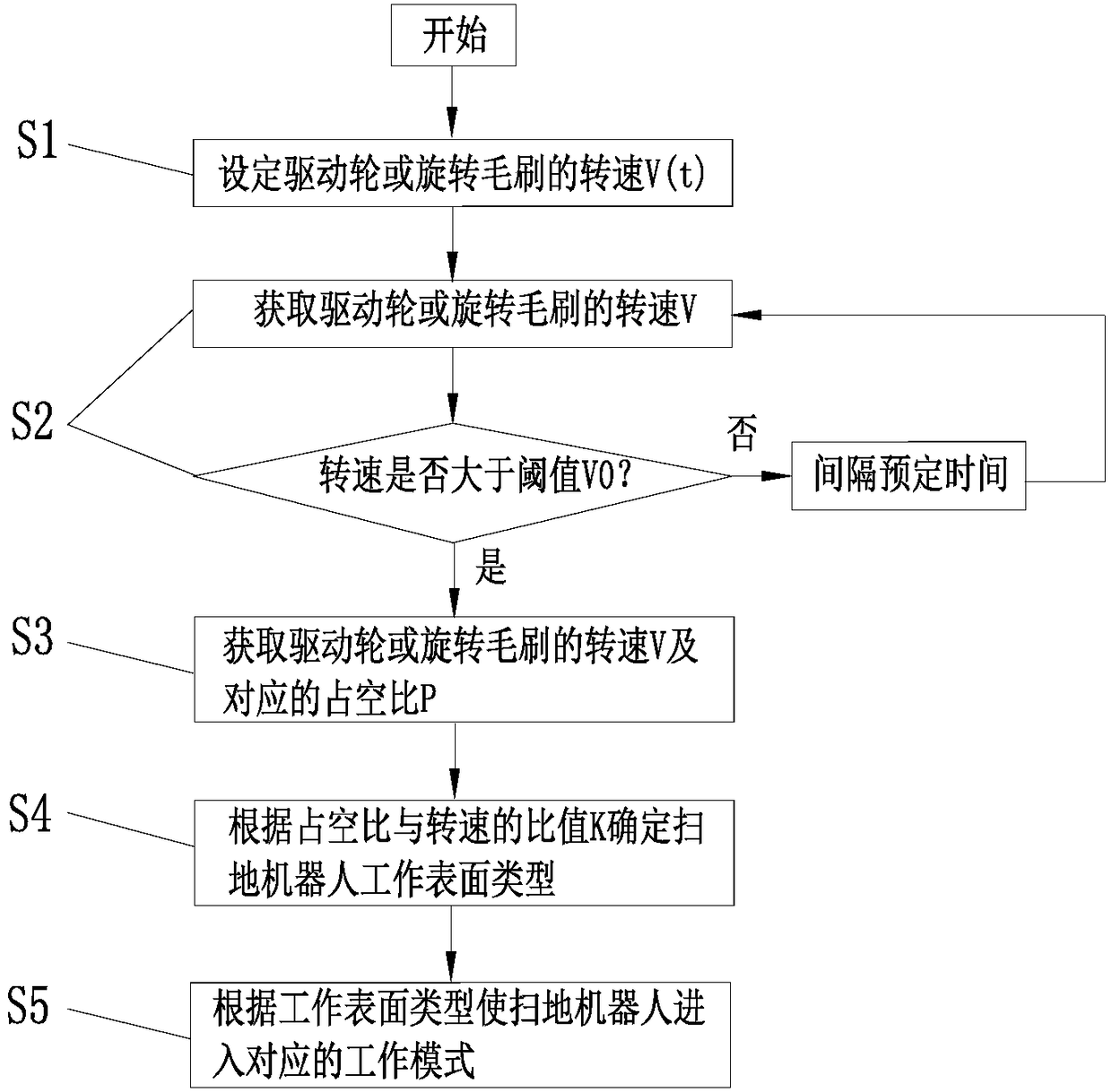
[0025] The single-chip microcomputer implants the PID program in the present embodiment to control the rotating speed of the drive wheel; the memory (i.e. storage module) of the single-chip microcomputer includes ROM and RAM, wherein ROM is used to store the ratio of the duty cyc...
Embodiment 2
[0041] The mobile robot in this embodiment is described by taking a mowing robot as an example.
[0042] The mowing robot in this embodiment includes a rotating device, an acquisition module, a storage module and a judgment module. Specifically, the rotating device in this embodiment is a drive wheel or a rotary cutterhead; the acquisition module of this embodiment includes a Hall sensor for acquiring the rotational speed of the drive wheel or the rotary cutterhead; the storage module is a memory of a single-chip microcomputer of a mowing robot; The judging module is a single-chip microcomputer.
[0043] The lawn type recognition method of the mowing robot in this embodiment is basically the same as that of the ground type in Embodiment 1, the difference is that the working speed of the mowing robot can be detected by detecting the rotating cutter head speed and duty cycle of the mowing robot. Lawn conditions, and then enter the corresponding mowing mode to improve the mowing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com