

Path planning method based on UTMD algorithm
A path planning and algorithm technology, which is used in navigation calculation tools, road network navigators, measuring devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
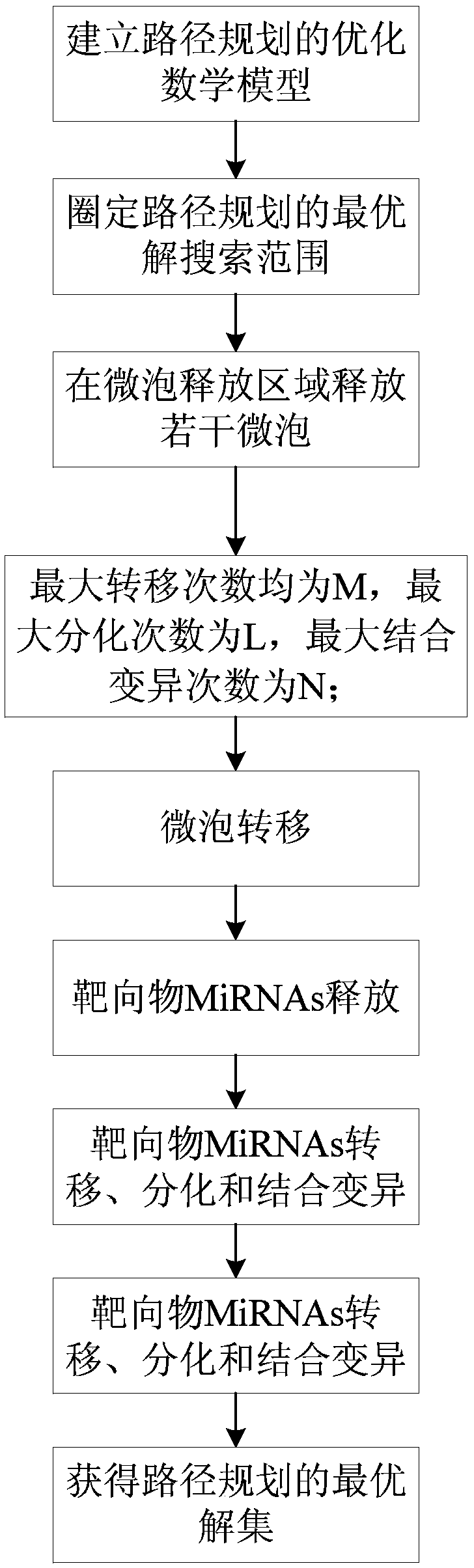
[0093] Such as figure 1 As shown, a kind of path planning method based on UTMD algorithm provided by the present invention comprises steps:
[0094] S1: Establish an optimized mathematical model for path planning;
[0095] S2: Use the UTMD algorithm to plan and optimize the path, as follows:
[0096] S21: Delineate the optimal solution search range for path planning;
[0097] S22: Within the optimal solution search range, use the UTMD algorithm to obtain an optimal solution set for path planning. Through the above method, the UTMD (Targeted Microbubble Destruction) algorithm is used to consider the road slope, and the path is optimized in real time in three-dimensional space, which effectively reduces the amount of iterative calculations and search time in the path planning process, and prevents local optimal solutions from appearing. , and improve the optimization accuracy of path planning.
[0098] The optimized mathematical model of the path planning includes: an object...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More