

Calibration method for attitude angle error of biaxial rotary inertial navigation system
An inertial navigation system and error calibration technology, applied in the field of inertial navigation, can solve problems such as increased attitude errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The technical solutions protected by the present invention will be specifically described below in conjunction with the accompanying drawings.
[0065] The attitude angle error calibration method proposed by the present invention is suitable for general platform inertial navigation systems, and most general platform inertial navigation systems adopt a two-frame three-axis structure, including gyroscopes, accelerometers, outer frames, inner frames and platform platforms body, wherein the gyroscope and accelerometer are installed on the platform body, and the outer frame, the inner frame and the platform body can rotate around the outer ring axis, the inner ring axis and the platform body axis respectively.
[0066] A method for calibrating an attitude angle error of a dual-axis rotary inertial navigation system, comprising the following steps:
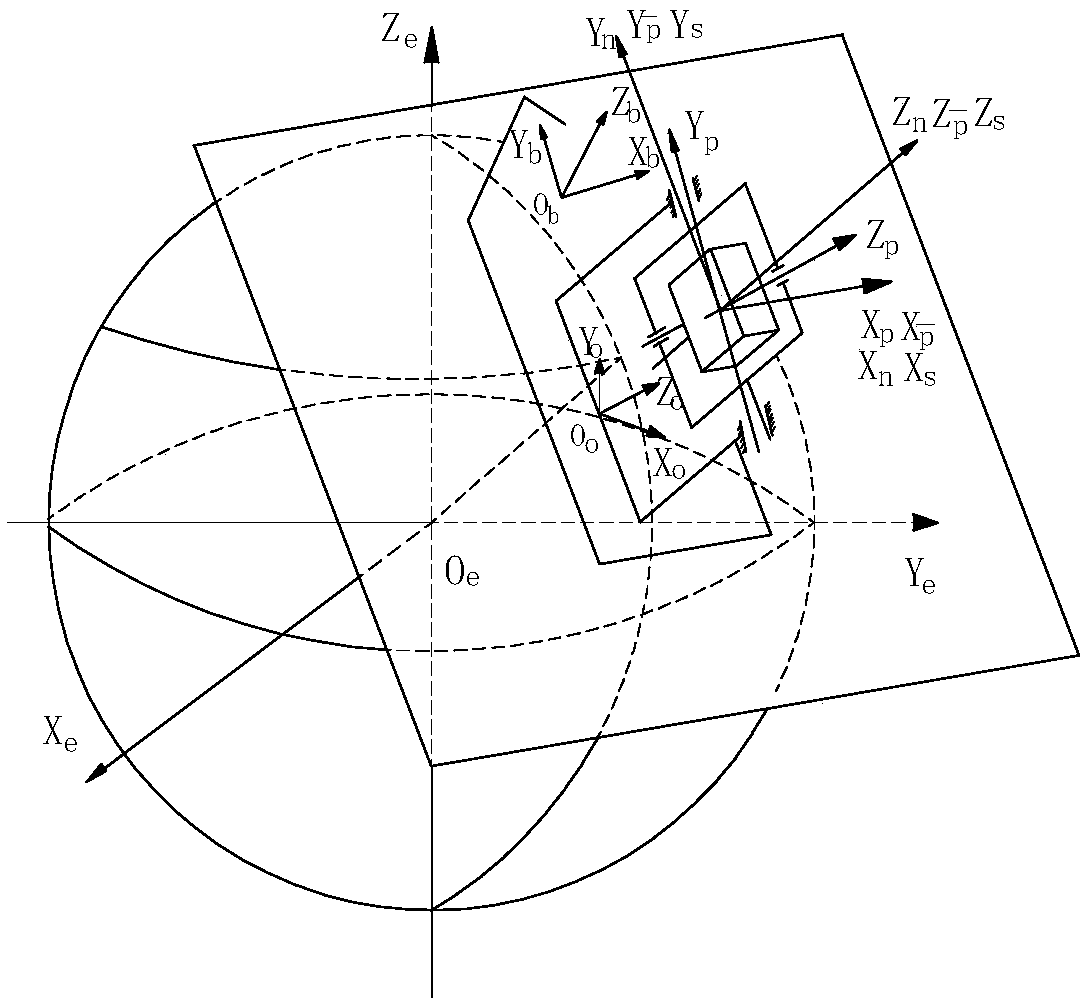
[0067] Step 1: Construct the coordinate system, figure 1 Provide the schematic diagram of each coordinate system that the pres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More