

SLAM method based on multi-fisheye camera and double-pinhole projection model
A fisheye camera and camera technology, applied in the field of computer vision, can solve problems such as monocular scale
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Embodiments of the present invention are described below through specific examples. It should be noted that the diagrams provided in this embodiment only illustrate the basic idea of the present invention in a schematic manner, so only the relevant aspects of the present invention are shown in the drawings. The components are not drawn according to the number, shape and size of the components in actual implementation. The type, quantity and proportion of each component in actual implementation can be changed arbitrarily, and the layout of the components may also be more complicated.
[0051] The present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
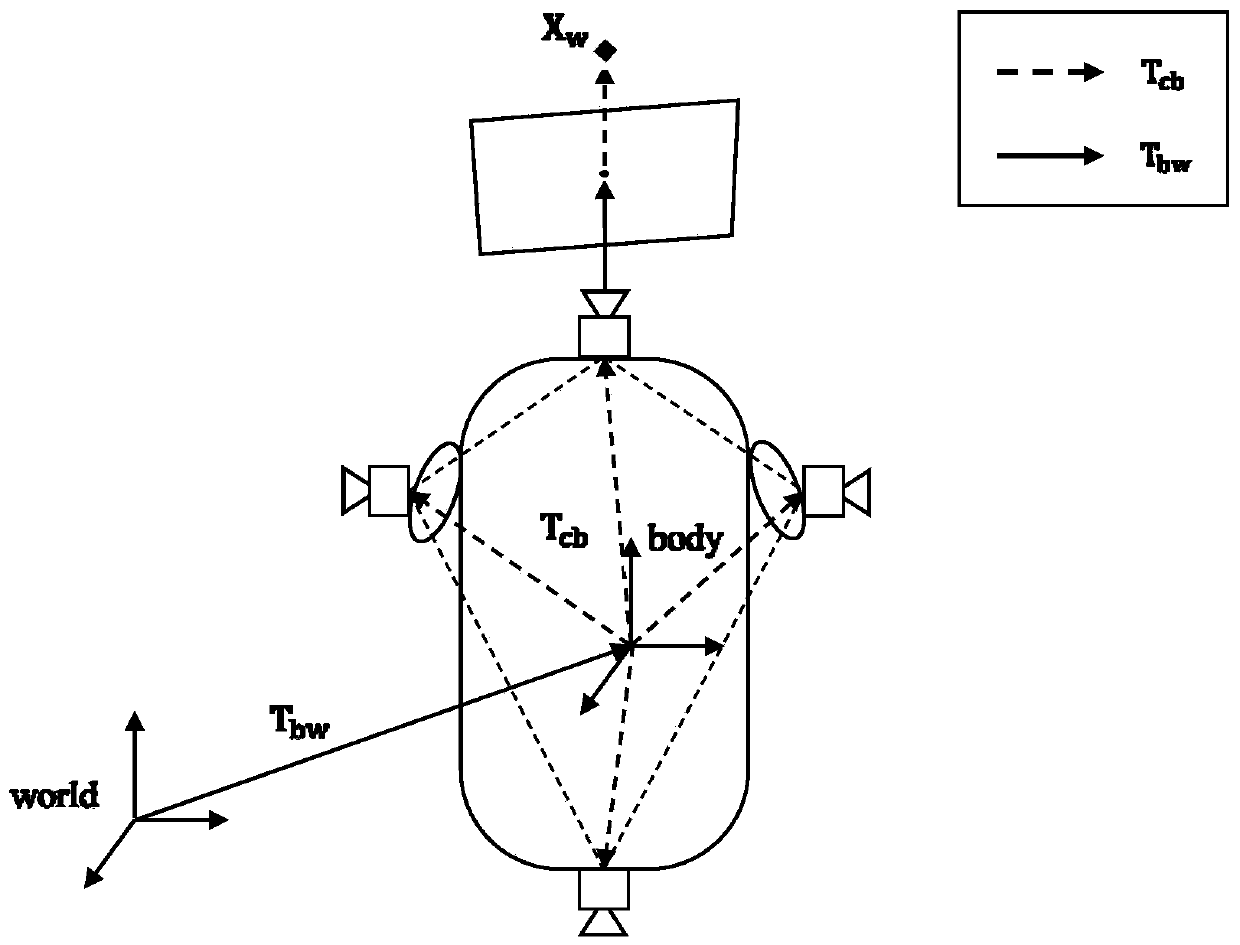
[0052] like figure 2 A SLAM method based on multi-fisheye cameras and a double-pinhole projection model is shown. The camera position distribution presents a certain symmetrical relationship. All cameras output four software-synchronized 1920×1208 images at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More