

Six-dimensional force sensor
A six-dimensional force sensor and torque technology, applied in the field of sensors, can solve the problems of inability to concentrate strain gauges, low sensor sensitivity, and large coupling between dimensions, and achieve the effects of simple structure, avoiding mutual interference and improving dynamic performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
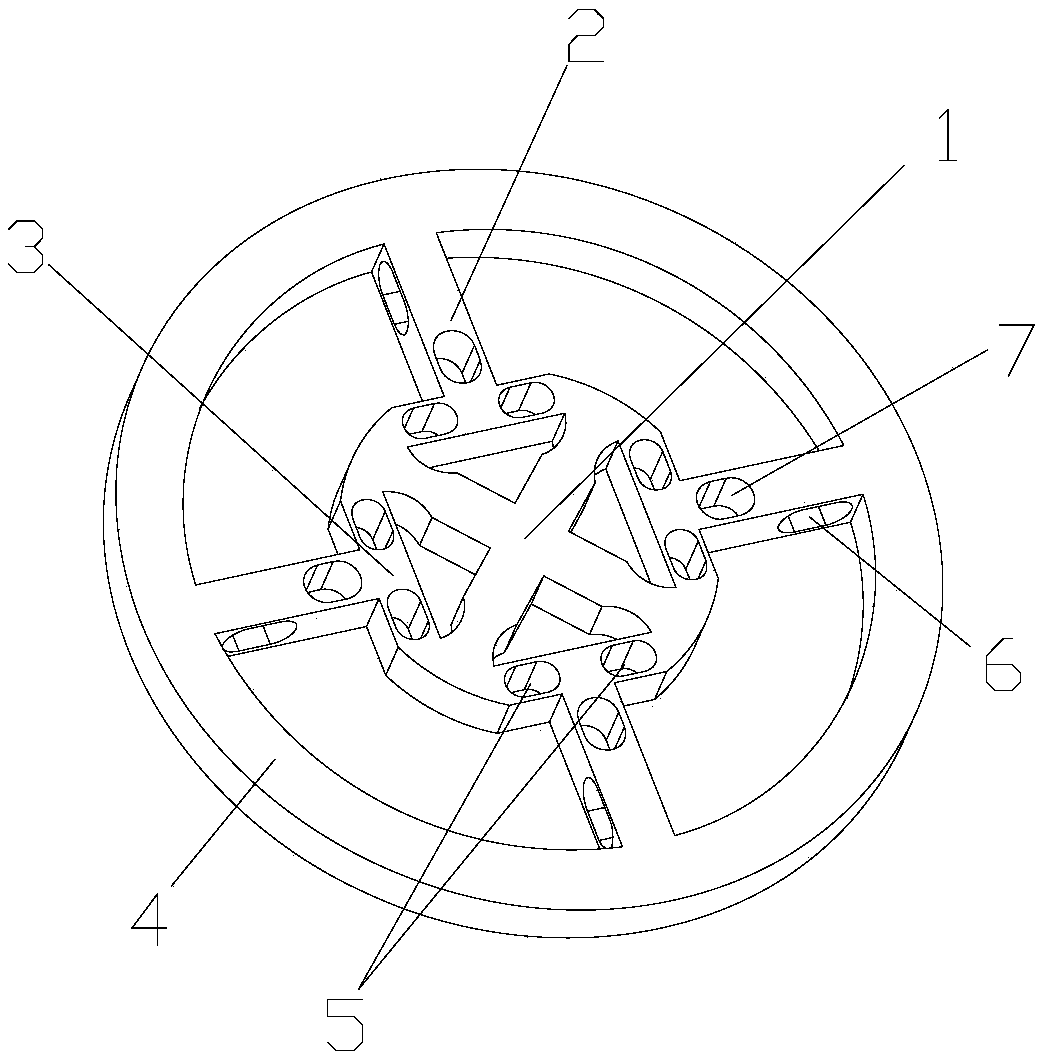
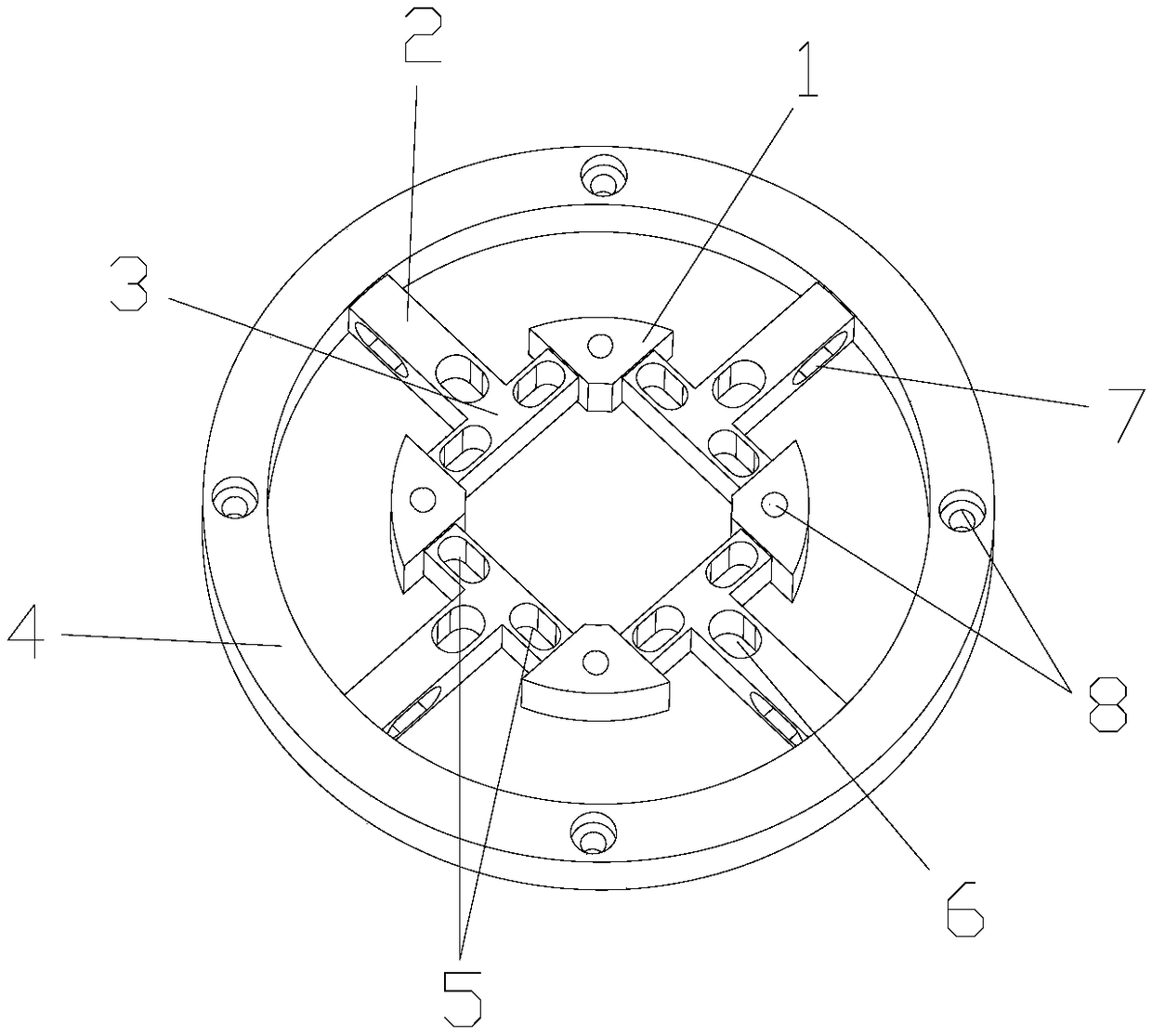
[0032] see figure 1 , Figure 1a and Figure 4 , the six-dimensional force sensor in this embodiment is: the center platform 1 is used as the inner ring, and the circumferential support 4 is used as the outer ring to form an inner and outer ring support structure; the inner end of the radial beam 2 is connected to the middle of the floating beam 3 to form a "T" beam structure; the radial beams 2 in the four sets of "T" beams are distributed in the shape of a "ten" on the periphery of the center platform 1, and the outer ends of each radial beam 2 are connected to the circumferential support 4. Two adjacent sections of floating beams 3 are connected by connecting blocks to form a ring-shaped central platform 1; for positioning and installation, positioning holes 8 are respectively provided on the circumferential support and each connecting block.
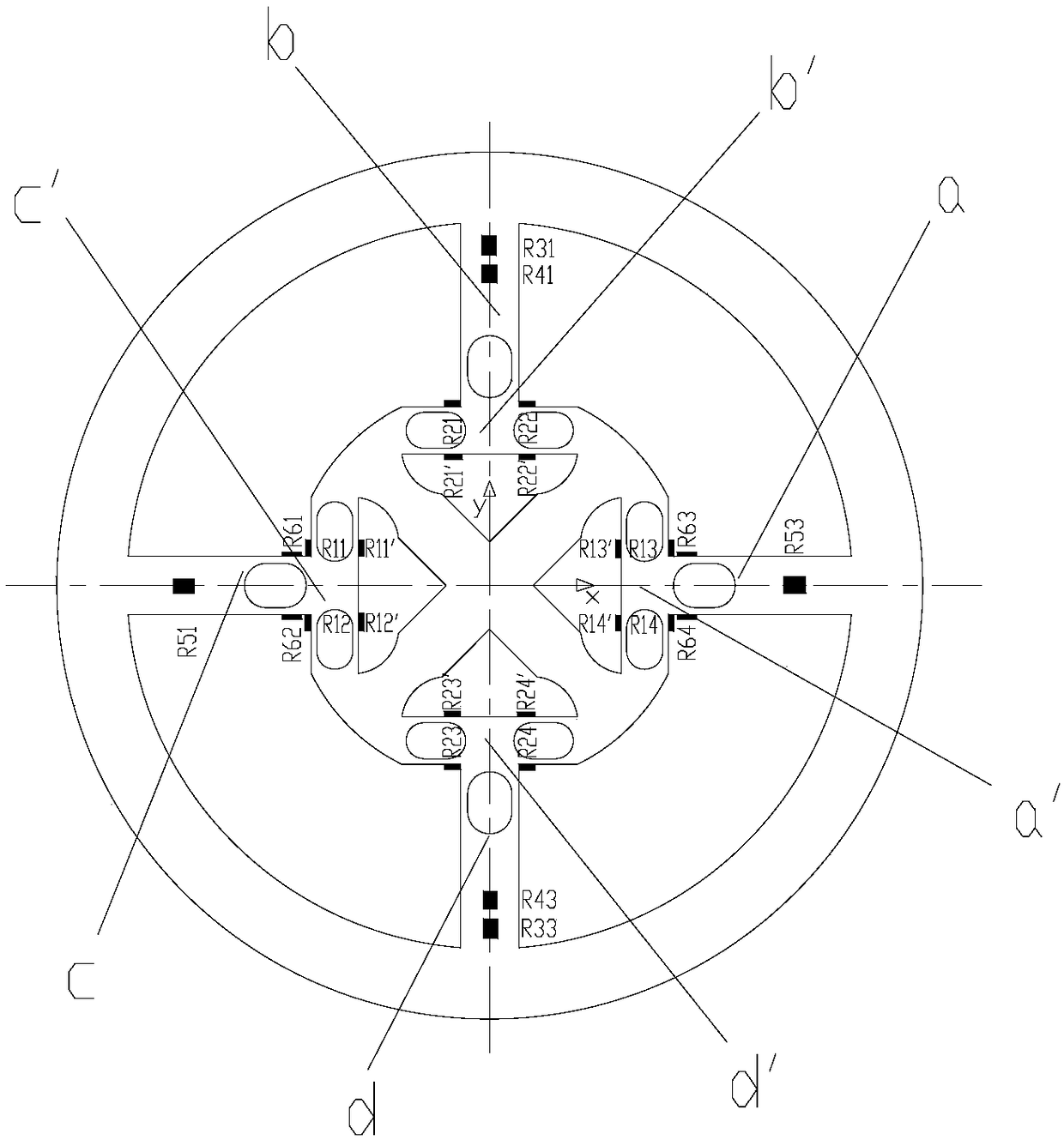
[0033] In this embodiment, the through holes and strain gauges are set on the radial beam 2 and the floating beam 3 in the follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More