

High-speed train automatic driving control system and control method for anti-intrusion signal
A technology for automatic driving control and high-speed trains, which is applied in the direction of railway signals and safety, and can solve problems such as train overspeed and distance, so as to improve operating efficiency and avoid automatic alarm or emergency braking events
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
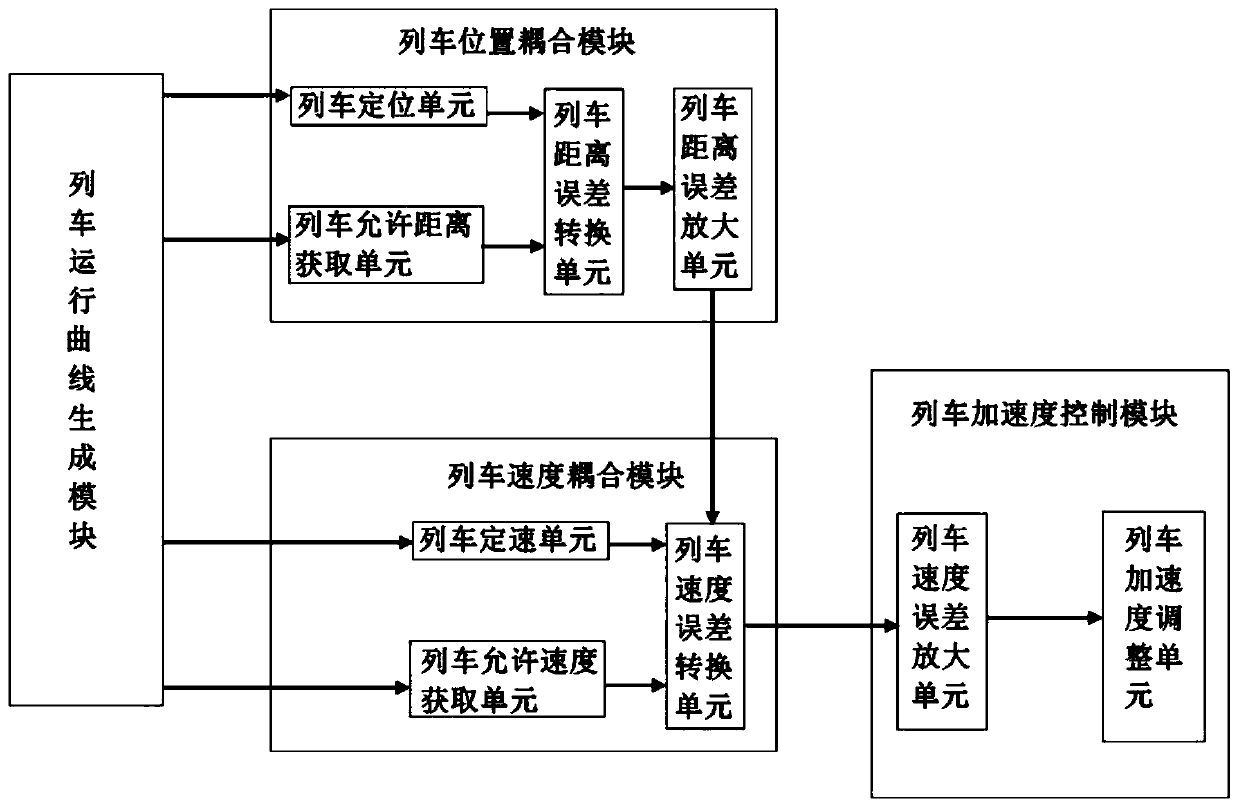
[0061] Such as figure 1 The illustrated embodiment of the present invention provides a high-speed train automatic driving control system for preventing aggressive signals, and the system includes:
[0062] Train operation curve generating module, used to generate the expected operation control curve of high-speed train;
[0063] The train position coupling module is used to obtain the distance-time coupling information of the train according to the desired operation control curve;
[0064] A train speed coupling module, configured to obtain the speed-time coupling information of the train according to the desired operation control curve in combination with the distance-time coupling information;
[0065] The train acceleration control module is used to control the acceleration of the train according to the speed-time coupling information.
[0066] In the specific embodiment 1 of the present invention, the train running curve generation module reads the departure and stop tim...
Embodiment 2
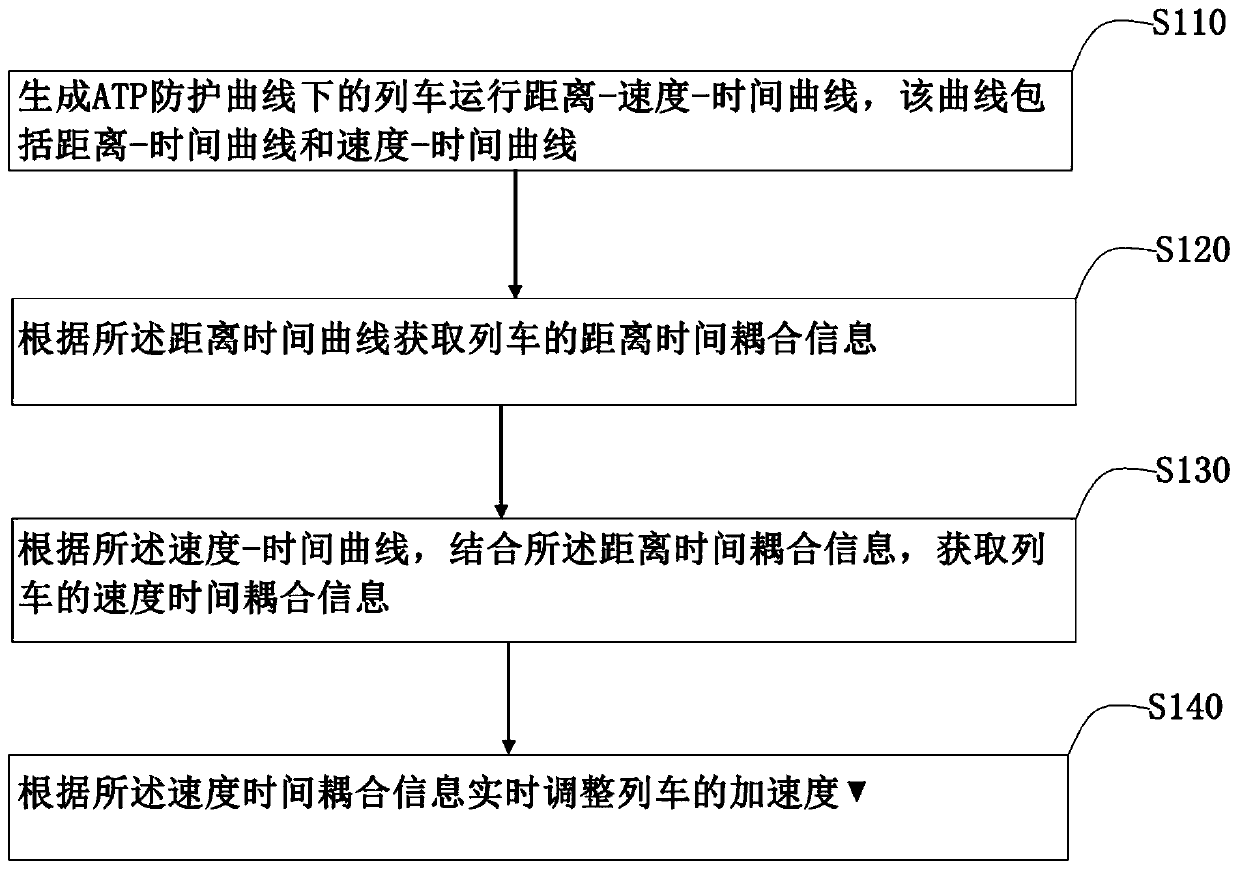
[0081] Such as figure 2 As shown, Embodiment 2 of the present invention provides a method for performing automatic driving control of high-speed trains using the system described in Embodiment 1. The method includes the following process steps:
[0082] Step S110: generating a train running distance-speed-time curve under the ATP protection curve, the curve includes a distance-time curve and a speed-time curve;
[0083] Step S120: Obtain the distance-time coupling information of the train according to the distance-time curve;
[0084] Step S130: Obtain the speed-time coupling information of the train according to the speed-time curve in combination with the distance-time coupling information;
[0085] Step S140: Adjust the acceleration of the train in real time according to the speed-time coupling information.
[0086] In the second specific embodiment of the present invention, the step S110 specifically includes:
[0087] Step S111: Read the departure and stop times set b...
Embodiment 3
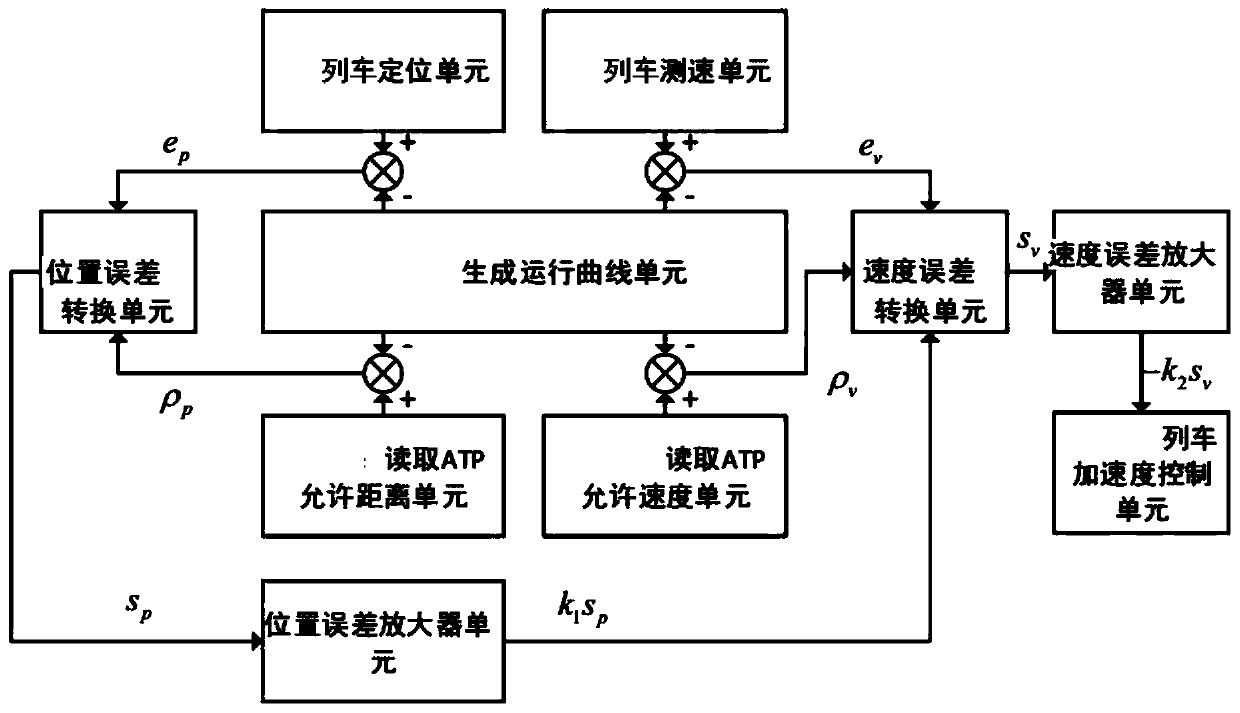
[0103] Such as image 3 As shown, the third embodiment of the present invention provides a high-speed train automatic driving control system for preventing aggressive signals, the system includes a running curve generating unit, a train positioning unit, a train speed measuring unit, a unit for reading the allowable distance of the ATP system, and a unit for reading the ATP system Allowable speed unit, position error conversion unit, position error amplification unit, speed error conversion unit, speed error release unit, acceleration control unit.
[0104] The workflow of the above-mentioned system to control the automatic driving of the train is as follows:
[0105] Step 1: The running curve generation unit generates the train's expected running speed-distance-time curve under the ATP protection curve, which can be split into speed-time curve v r (t) and the distance-time curve P r (t).
[0106] Such as Figure 4 As shown, it is a schematic diagram of the actual distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More