Space failure target derotation arresting integrated device and method based on multi-space robot
A technology of space robots and robots, which is applied to aircraft, motor vehicles, transportation and packaging, etc., can solve the problems of increasing the complexity of space failure target racemization capture tasks, increasing the complexity of serving spacecraft, etc., and achieving simple and reliable structure high performance and reduced complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0055] The present invention provides a multi-space robot-based derotation capture integration method for space failure targets, comprising the following steps:
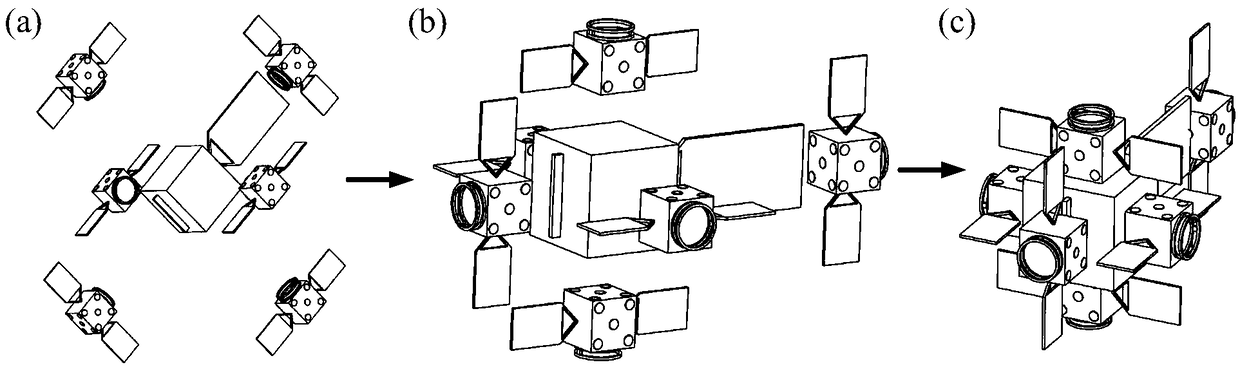
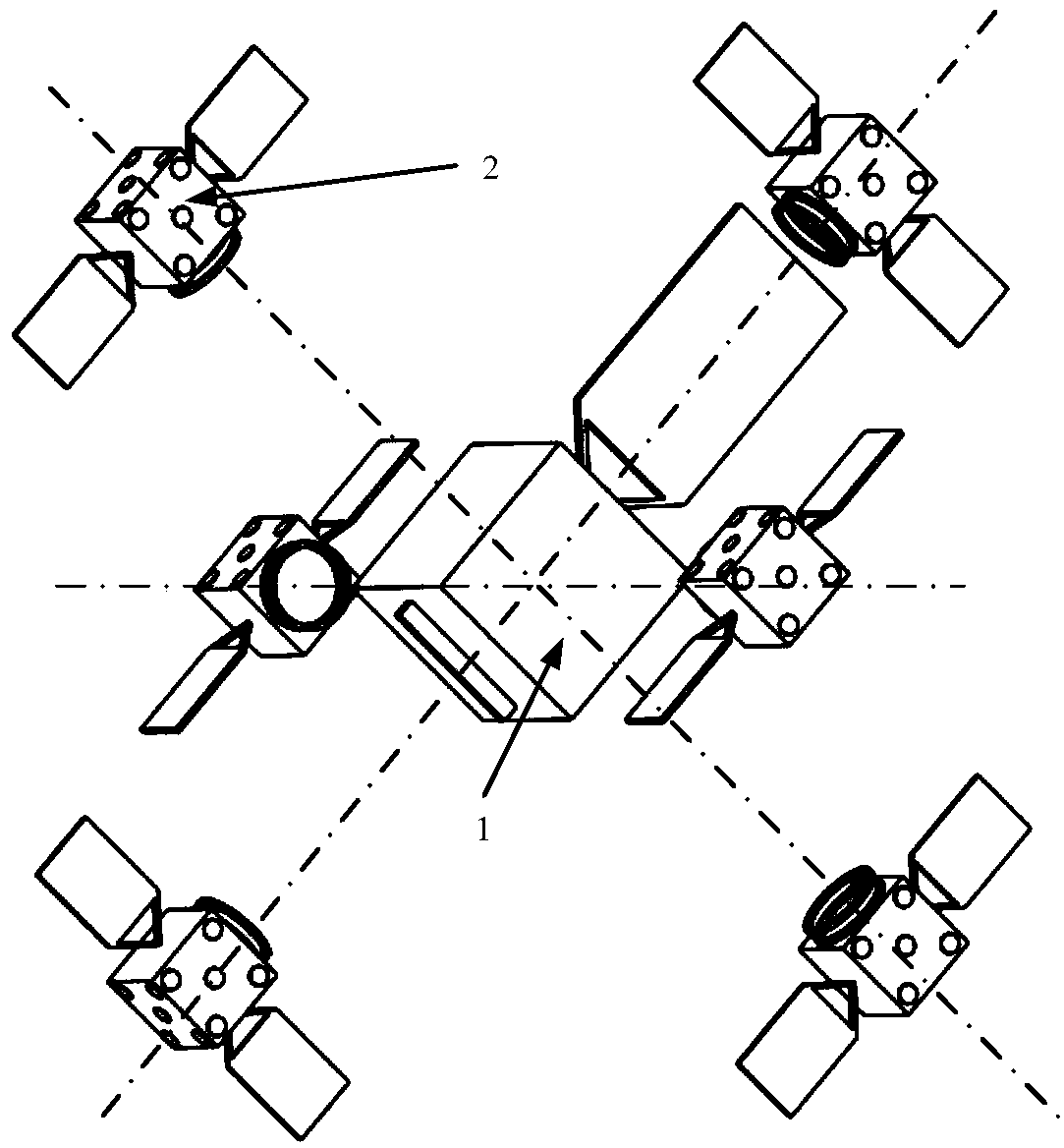
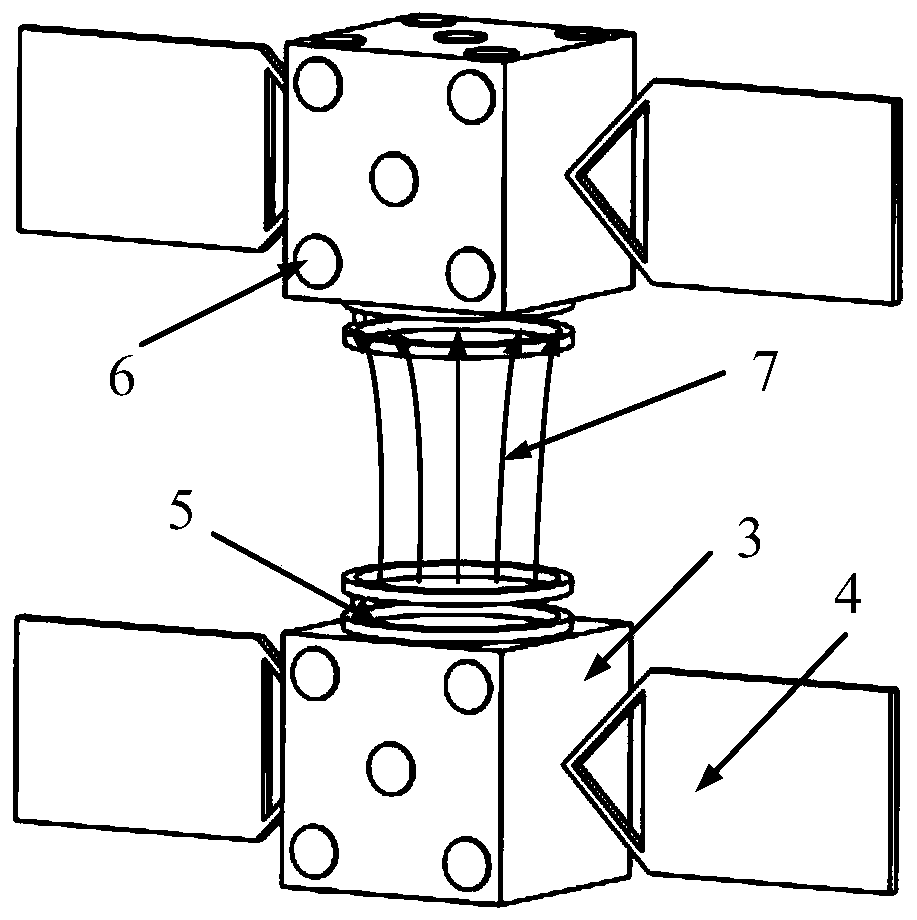
[0056] Step 1: Configuration construction of the space robot formation. The space robot approaches the target, and evenly parks within a safe distance near the six directions of the target, front, rear, left, right, up and down. It is required that the Helmholtz coils carried by the space robots docked at the front, back, left, right, and up and down positions of the target face each other respectively to complete the space robot formation. structure. The outer surface of the space robot is evenly distributed with suction cups, which can be used as an adsorption component between the space robot and the space failure target. At least 6 space robots are required, and the number of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com