

Apple picking robot hand structure
A picking robot and hand technology, which is applied to picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of poor picking effect of fruit picking robots, and achieve the effect of improving the degree of adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
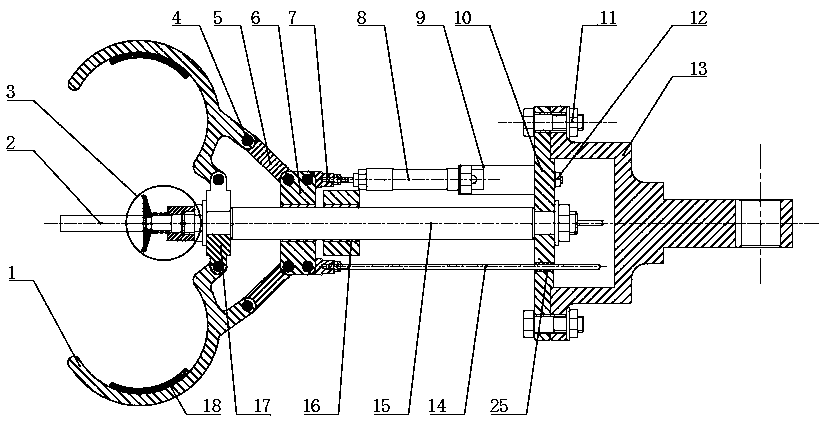
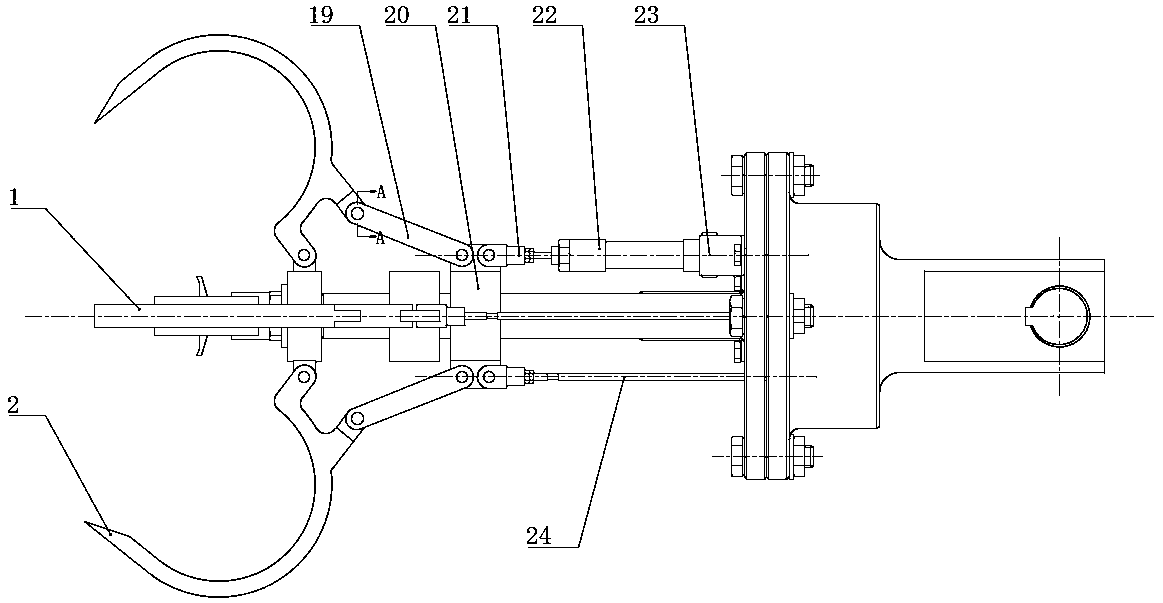
[0025] Such as Figure 1-2 As shown, the present invention is a pneumatically driven robot hand structure with self-adaptive function, including grabbing fingers 1, cutting fingers 2, self-adapting components 3, rotating shaft components 4, connecting rods I5, movable rings I6, connectors I7, Cylinder Ⅰ8, support frame Ⅰ9, support flange 10, bolt connection piece I11, bolt connection piece II12, wrist flange 13, guide rod I14, support rod 15, shaft sleeve I16,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More