

Underwater buoyancy force automatic adjustment device and using method thereof
An automatic adjustment and buoyancy-driven technology, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems that the underwater buoyancy driving device cannot complete the work stably, and cannot adjust the remaining buoyancy of the underwater buoyancy driving device.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
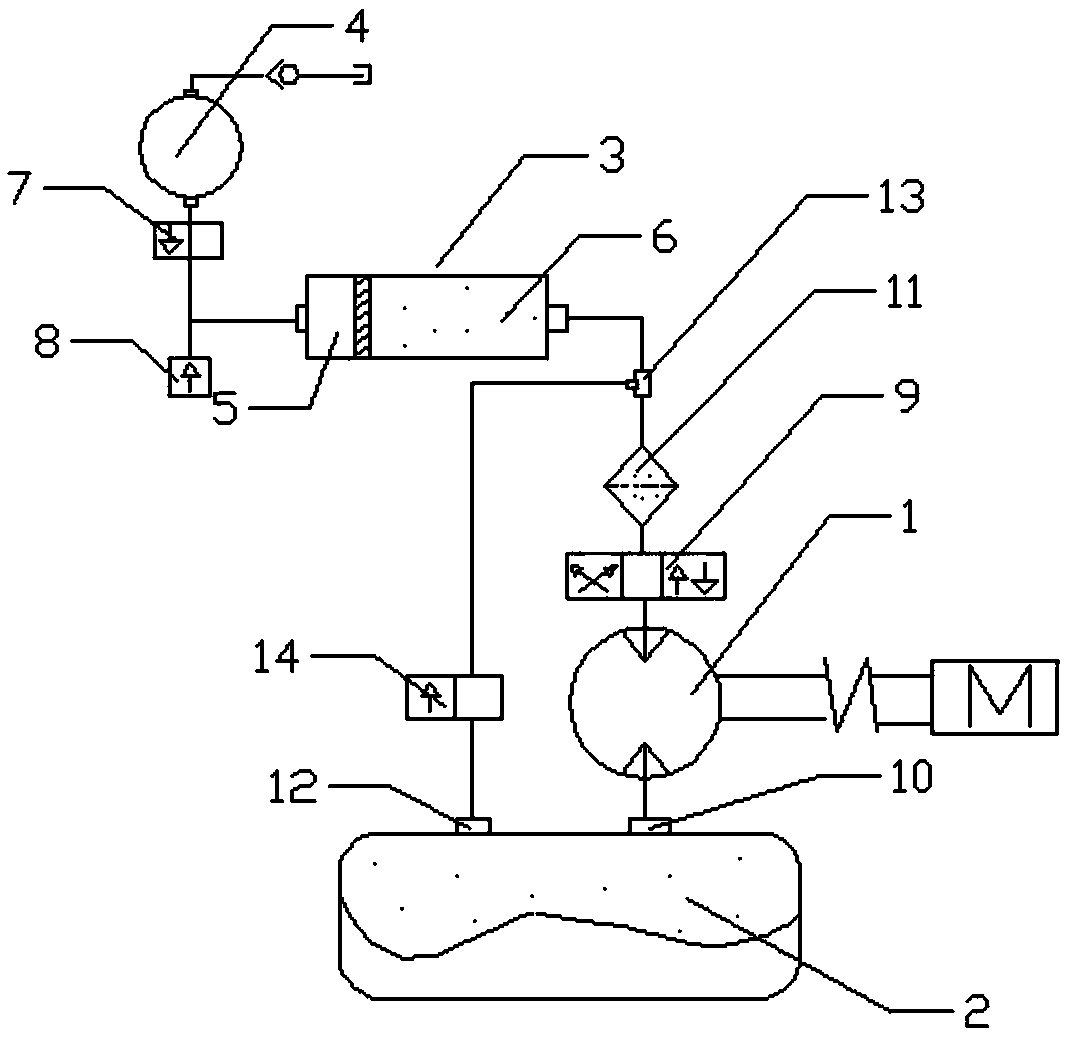
[0028] Such as figure 1 As shown, an underwater buoyancy automatic adjustment device provided by the present invention includes a main controller and a hydropneumatic energy storage system respectively connected to the main controller, a two-way oil well pump 1 and a first pressure sensor for detecting the external environment pressure ; The pipeline system of the buoyancy automatic adjustment device is sequentially connected with a hydropneumatic energy storage system, a bidirectional oil well pump 1 and an elastic container 2; the hydraulic pneumatic energy storage system includes an inflatable accumulator 3 and a high-pressure gas cylinder 4, The device 3 includes a cavity, one side of the cavity is a retractable airbag cavity 5, the rest of the cavity outside the airbag cavity 5 is an oil cavity 6, and the high-pressure gas cylinder 4 is connected to the open end of the airbag cavity 5 through the first pipeline , the first pipeline is connected with a solenoid valve 7 wit...
Embodiment 2
[0039] When in the underwater automatic buoyancy adjustment device of embodiment 1: the volume of the oily liquid in the pipeline system of the buoyancy automatic adjustment device is 20L, and the oily liquid is machine oil AMG-5; the sensitivity of the first pressure sensor is the required diving underwater 0.5% of the depth range; when the pump capacity of the two-way oil pump is 40L / min, the underwater buoyancy driving device is an underwater vehicle, and the specific use method of the underwater buoyancy automatic adjustment device of embodiment 1 utilizing this parameter configuration, Include the following steps:
[0040] 1) The underwater automatic buoyancy adjustment device in Example 1 is installed on the underwater vehicle. When the initial position is that the underwater vehicle is on the water surface, the oily liquid in the pipeline system of the automatic buoyancy adjustment device is located in the elastic container In 2, the underwater vehicle has a positive bu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More