A helical traveling robot with variable diameter outside the pipe
A traveling and robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as weak adaptability, insufficient adhesion, small adjustment range, etc., and achieve strong pipe diameter adaptability, strong climbing ability, Wide range of adjustable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
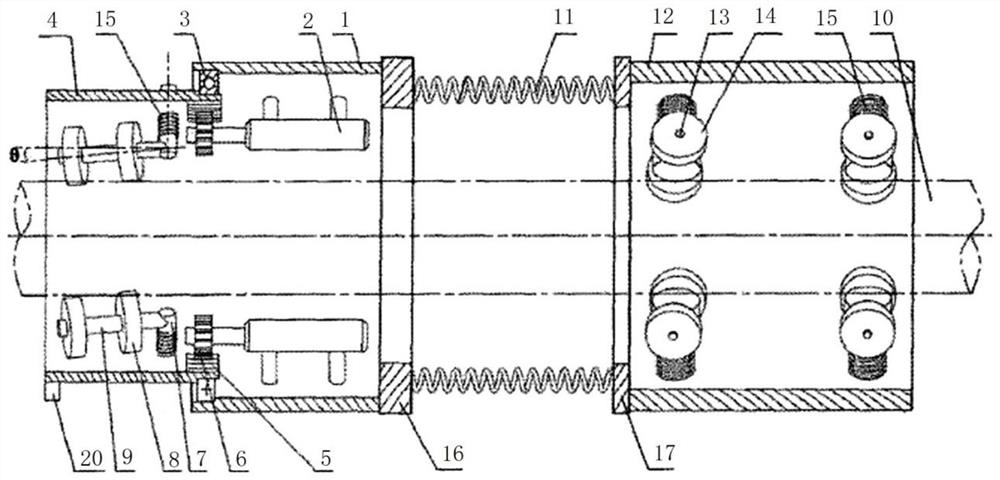
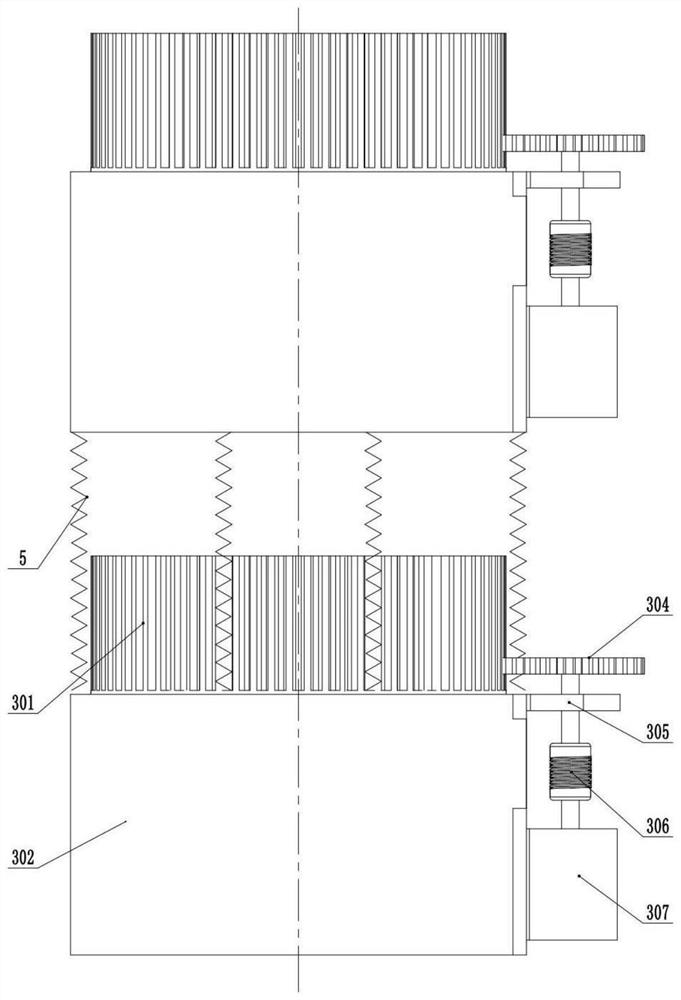
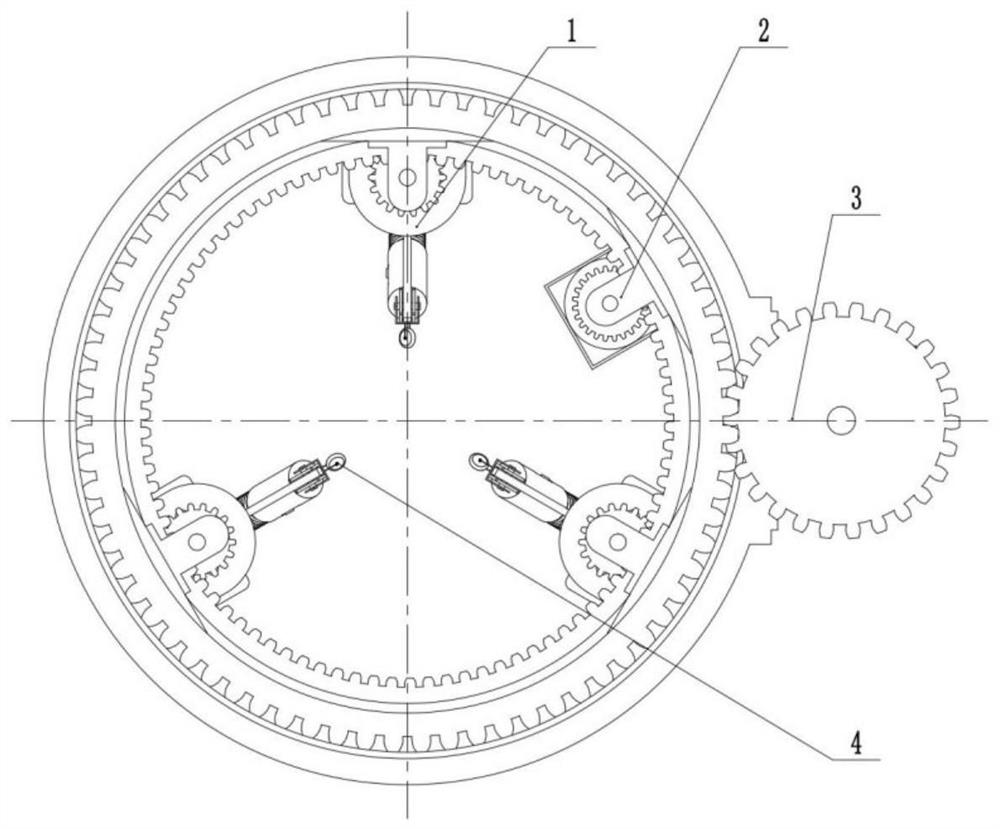
[0027] Figure 2 to Figure 5 shows a schematic structural view of a preferred embodiment of the present invention, figure 2 One of the spiral-traveling variable-diameter external robots is divided into two groups, and the front and rear groups are flexibly connected by connecting springs 5. The two groups of robots are supported by six poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More