

A device and method for detecting a turn signal of a vehicle adjacent to a lane
A technology of approaching lanes and detection devices, applied in signal devices, instruments, scene recognition, etc., can solve the problems of poor application of turn signal recognition technology, no early warning, and delayed early warning function, so as to improve driving safety and detection efficiency. , to avoid the effect of lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
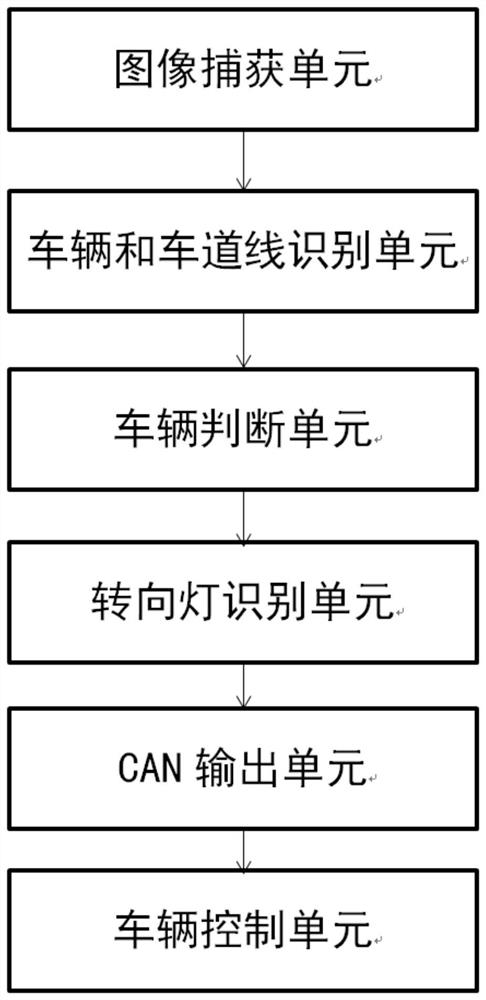
[0023] This embodiment provides a vehicle turn signal detection device adjacent to the lane, such as figure 1 As shown, it includes an image capture unit, a vehicle and lane line recognition unit, a vehicle judgment unit, a turn signal recognition unit, a CAN output unit and a vehicle control unit connected in sequence. The output of the image capture unit is used as the input of the vehicle and lane line recognition unit, and the vehicle and lane line recognition unit outputs the recognized vehicle world coordinates, image coordinates, image frame information and lane lines to the vehicle judging unit equation.
[0024] The vehicle judging unit is used to calculate the lane line of the lane where the vehicle is located according to the lane line equation, identify the vehicle ID information on the left or right side of the vehicle lane line that meets the preset conditions, and output the vehicle information to the turn signal Recognition unit; the turn signal recognition un...
Embodiment 2
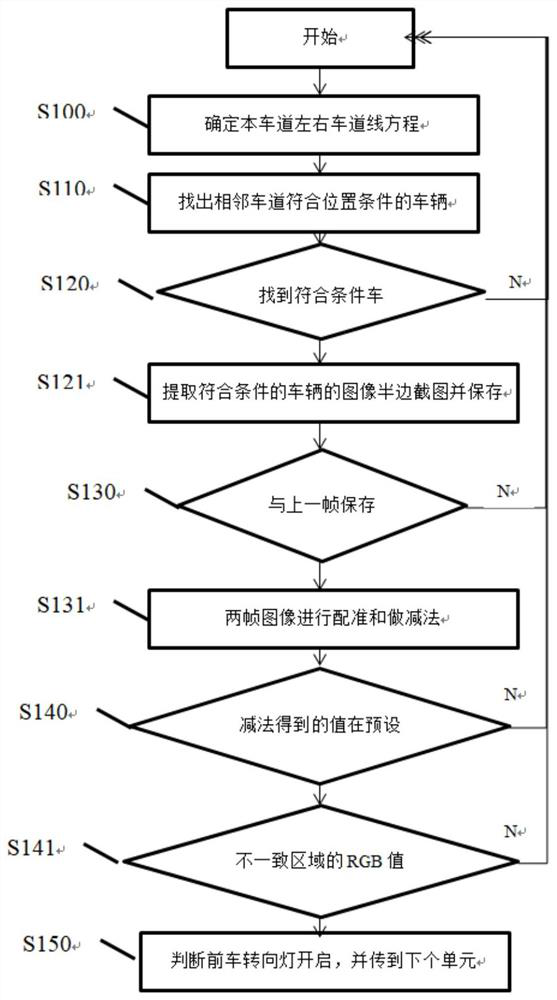
[0026] The present invention also provides a method for detecting the turn signal of an adjacent lane vehicle, such as figure 2 shown, including:
[0027] Step S100: Determine the left and right lane line equations of the current lane. The output of the vehicle and lane line recognition unit is four lane line equations (y=A0+A1*x+A2*(x 2 )+A3*(x 3 ), the projection from the center of the front of the car to the ground is the origin, the longitudinal direction of the front of the car is the x-axis, the lateral direction is the y-axis, and the left side is positive), and the vehicle information recognized in front (including the ID of the vehicle, the world coordinate position, the image coordinate position, the image box information). Comparing the A0 of the four lane lines, the one that is less than 0 and the closest to 0 is the right lane line of the current lane, and the one that is greater than 0 and the closest to 0 is the left lane line of the current lane.
[0028] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More