

Optimal path planning and obstacle avoiding design method for underwater vehicle
An optimal path planning and underwater vehicle technology, applied in navigation calculation tools and other directions, can solve problems such as the width of the vehicle body, the length of the broken line of the path, and the sawtooth effect, etc., to achieve short time consumption, small amount of calculation, and collision avoidance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
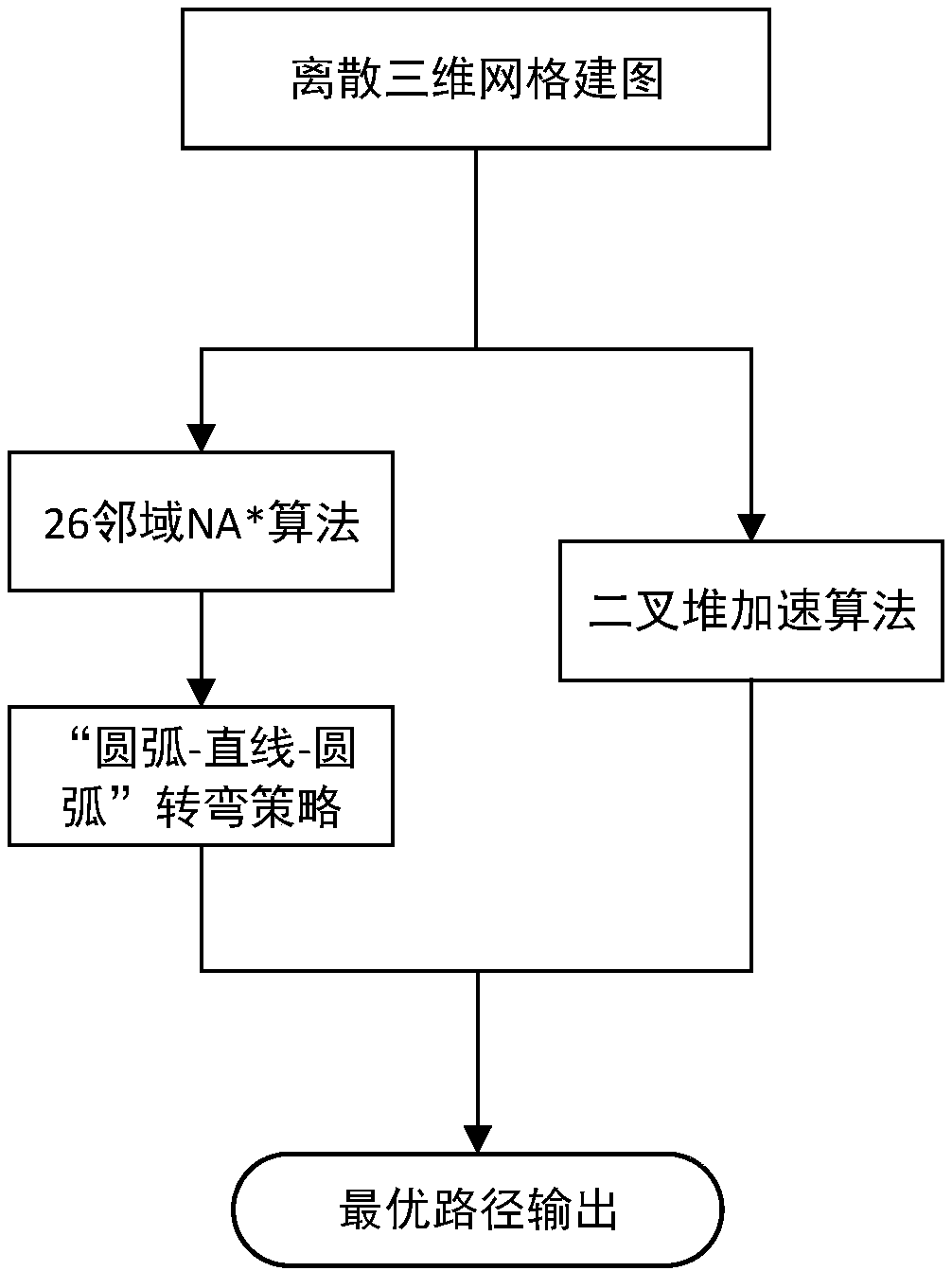
[0025] Such as figure 1 As shown, the optimal path planning and obstacle avoidance design method of the underwater vehicle described in the present invention is composed of discrete three-dimensional grid modeling, NA* algorithm, "arc-straight line-arc" turning strategy, based on two The path planning method combined with the acceleration method of fork and heap, the specific steps include:
[0026] (1) Establish a discrete three-dimensional grid map;
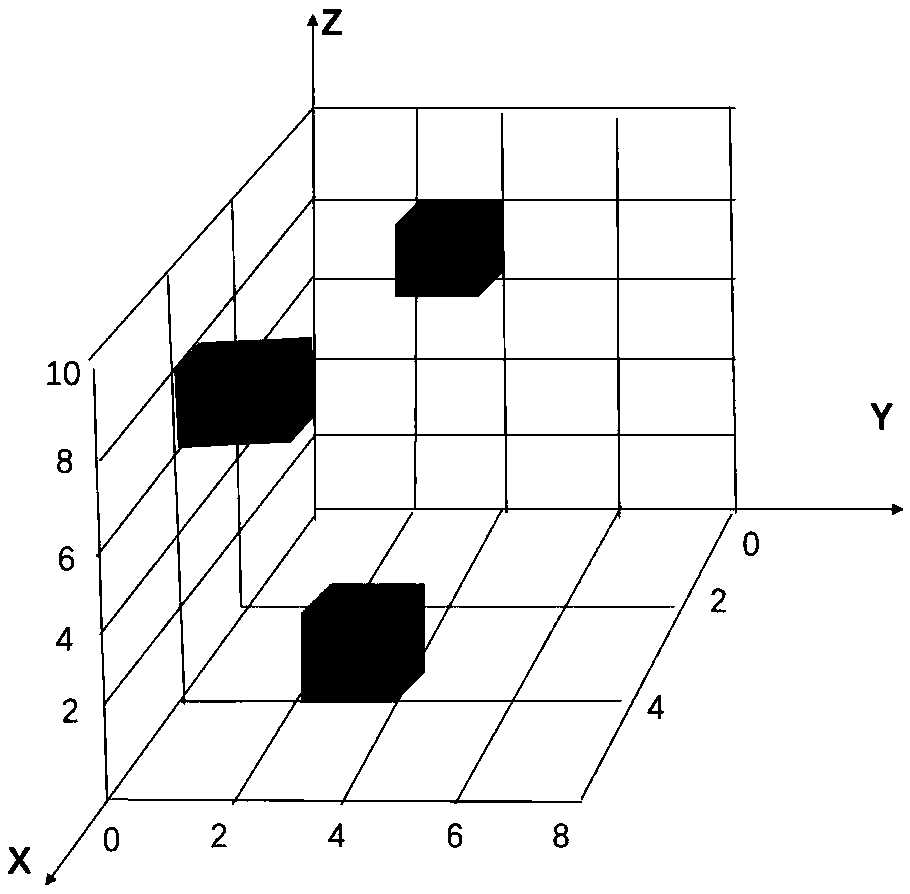
[0027] The underwater environment is divided into several dark cells and transparent cells of the same size by using a discrete 3D grid map, such as figure 2 As shown, dark cells (M, N, U, V) represent obstacles, and transparent cells represent obstacle-free spaces.
[0028] The position of each node in the discrete three-dimensional grid graph is determined by the three-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More