

Camera pose estimation method, system, device and storage medium
A pose estimation and camera technology, applied in the field of positioning and tracking, can solve the problems of large intersection error and low pose estimation accuracy, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The specific embodiments of the present invention are used to illustrate the present invention, but are not limited to the specific embodiments.
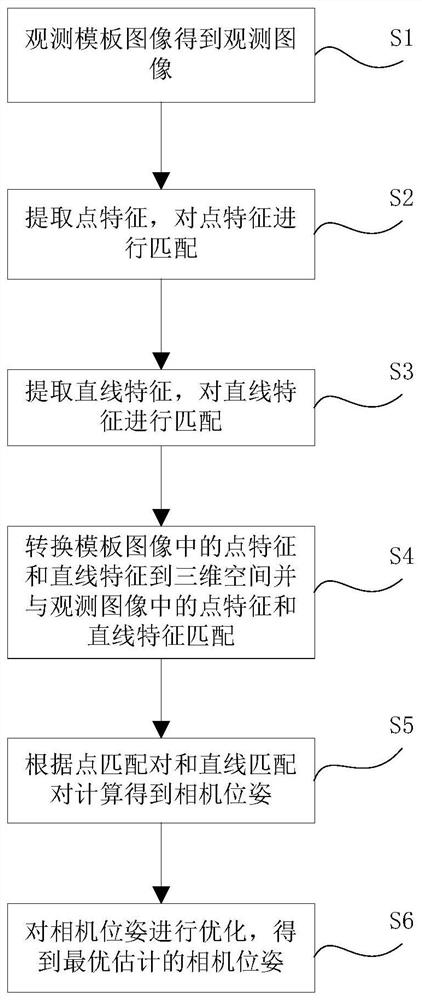
[0033] figure 1 It is an overall flowchart of the camera pose estimation method according to the embodiment of the present invention;
[0034] Such as figure 1 As shown, the camera pose estimation method of the embodiment of the present invention includes the following steps:
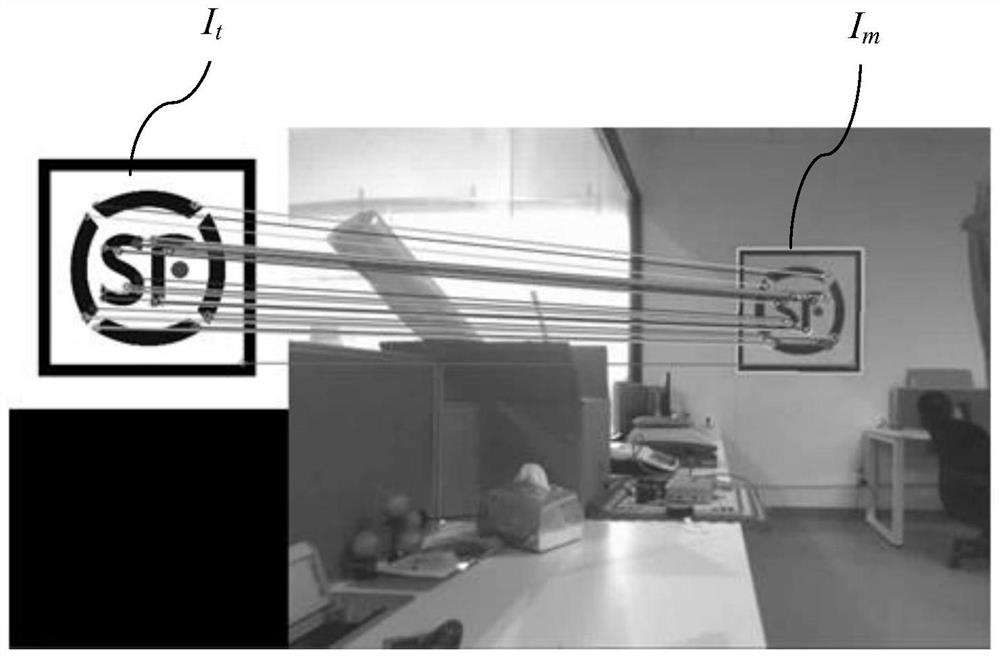
[0035] In step S1, the observation image is obtained by observing the selected template image with the camera.
[0036] First, select a template image I m , the size of the template is known, let the actual physical width and height of the template be W p , H p , the unit is meter; set the width and height of the template image as W m , H m , whose unit is pixel.
[0037] Then use the camera to observe the selected template image I m , get the observed image I t .
[0038] Step S2, extracting point features in the template image and the obse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More