Multi-drone multi-deck coordination method
A coordination method and deck technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problem of high dependence on pilots, achieve the effects of reducing demand, good scalability, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
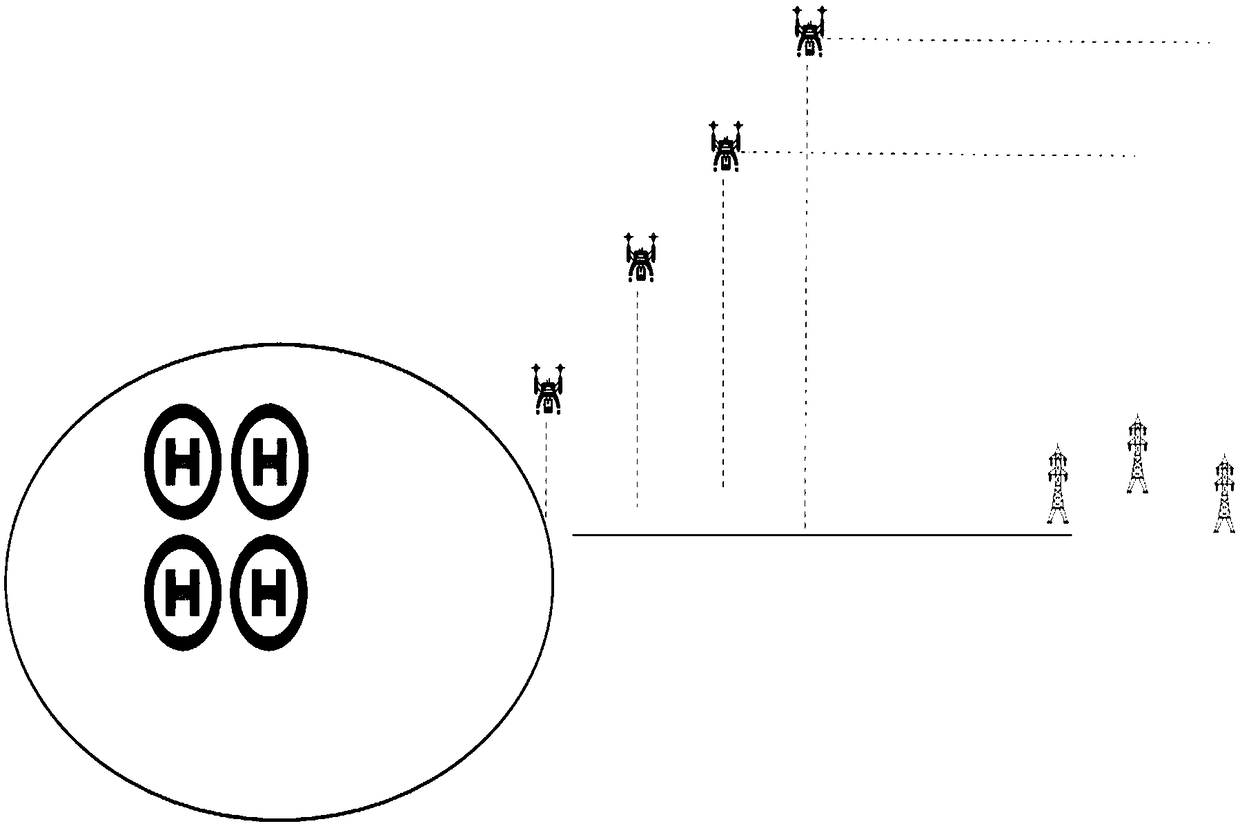
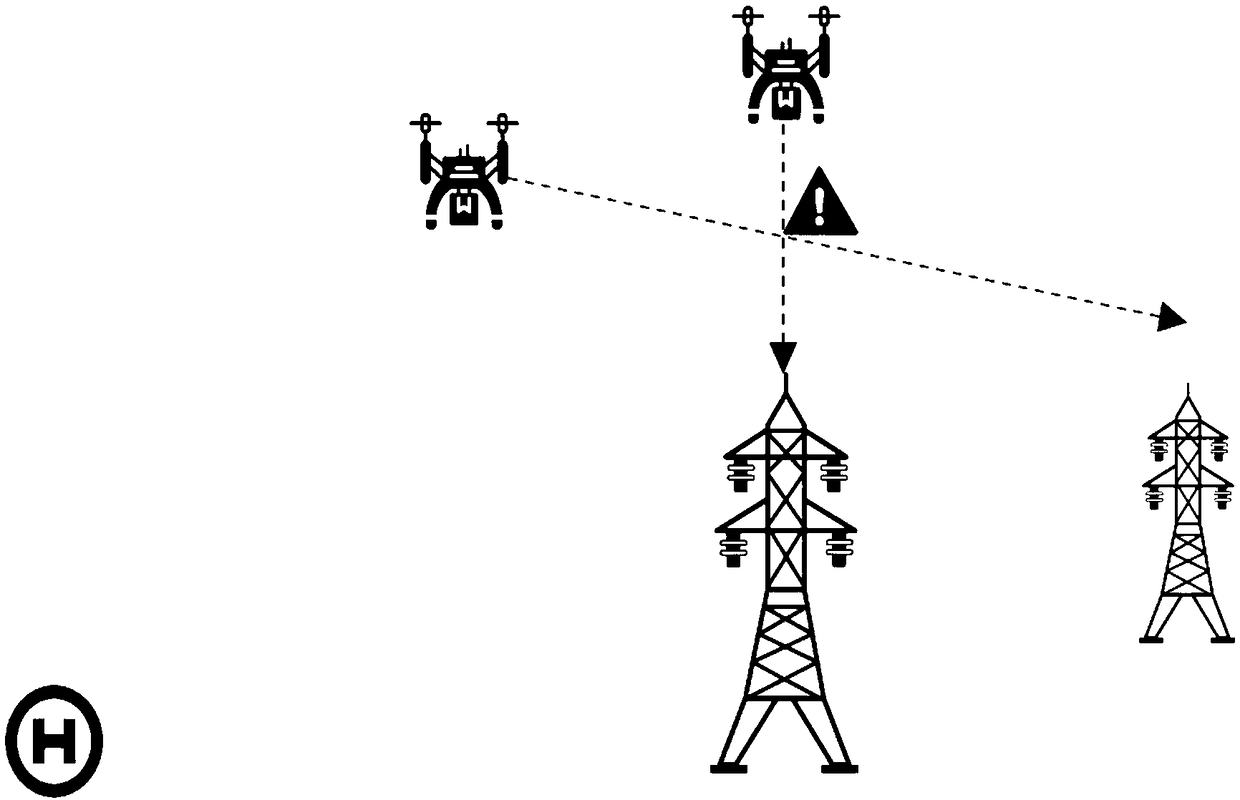
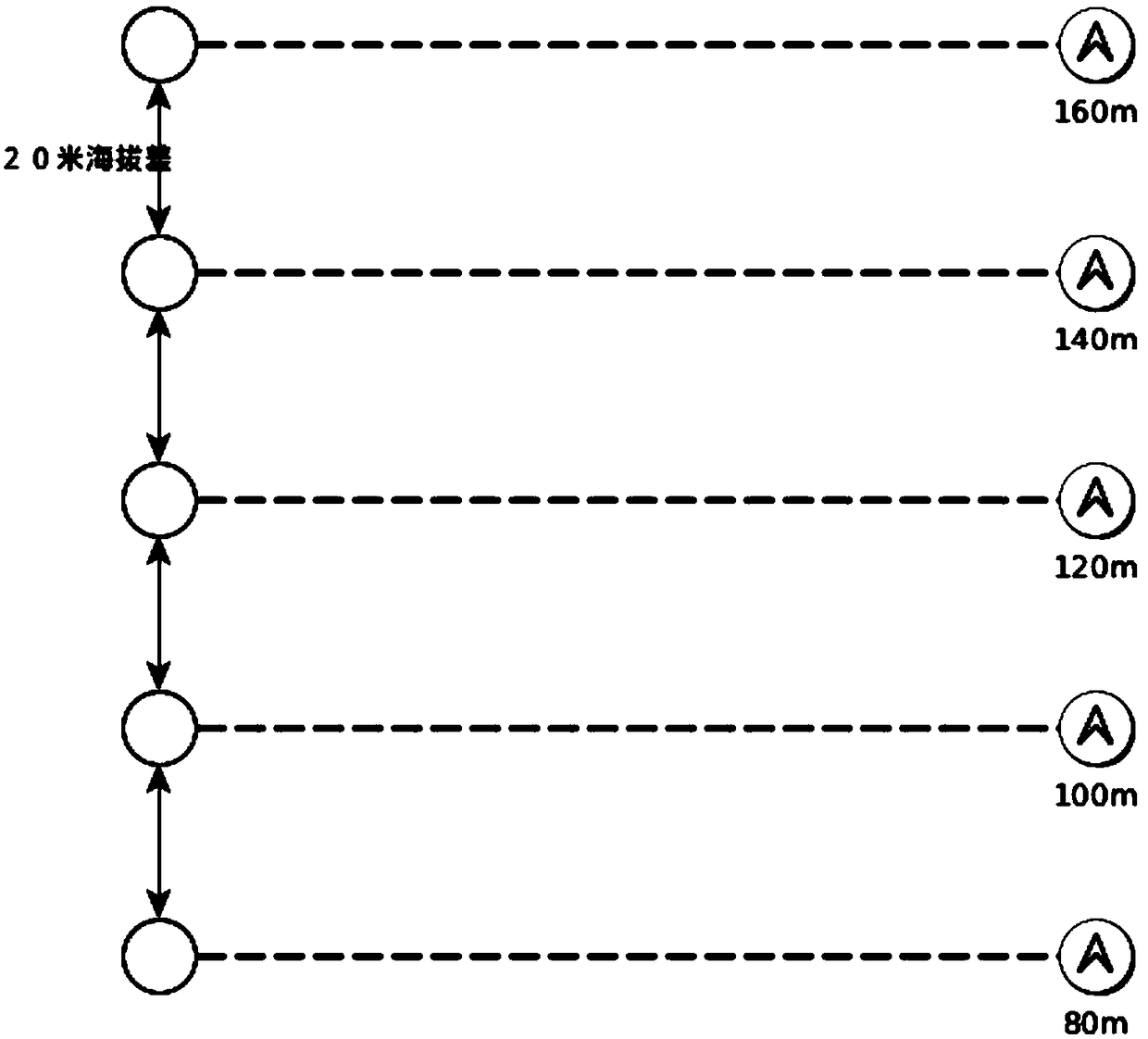
[0032] Such as Figure 1-4 As shown, a multi-machine multi-deck coordination method includes deck state monitoring, deck airspace management, UAV inspection, mission state monitoring, safety plane height planning, route conflict management and route conflict prevention. The specific method steps are as follows:
[0033] Deck status monitoring: The deck system will continuously send its own status to the UAV software system at a certain time interval, and pull the latest operation commands from the UAV software system, and complete the lifting platform in accordance with the scheduling requirements of the UAV software system To let the UAV take off, or drop the platform to recover the UAV after landing, the UAV software system combines the scheduling requirements and the current state of the deck to send the appropriate command to the deck and wait for the deck to complete the operation corresponding to the command;
[0034] Deck airspace management: implemented and maintained ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com