

Four-jaw synchronous mechanical unlocking automatic pick-and-place device
An automatic pick-and-place and synchronous technology, which is applied in the field of cargo pick-and-place, can solve the problems of bulky and bulky structures, and achieve the effects of simple control methods, reduced possibilities, and improved mechanical reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
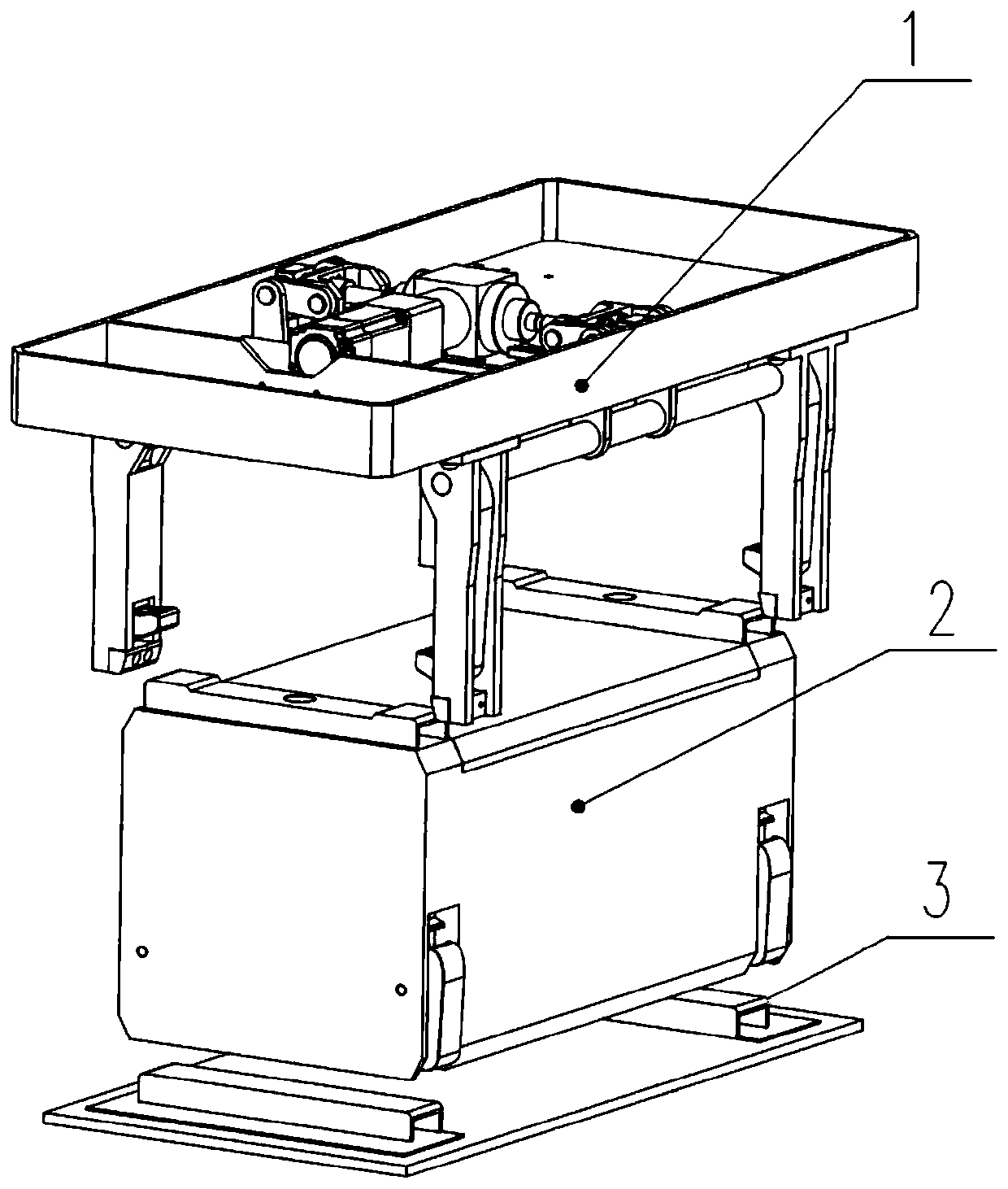
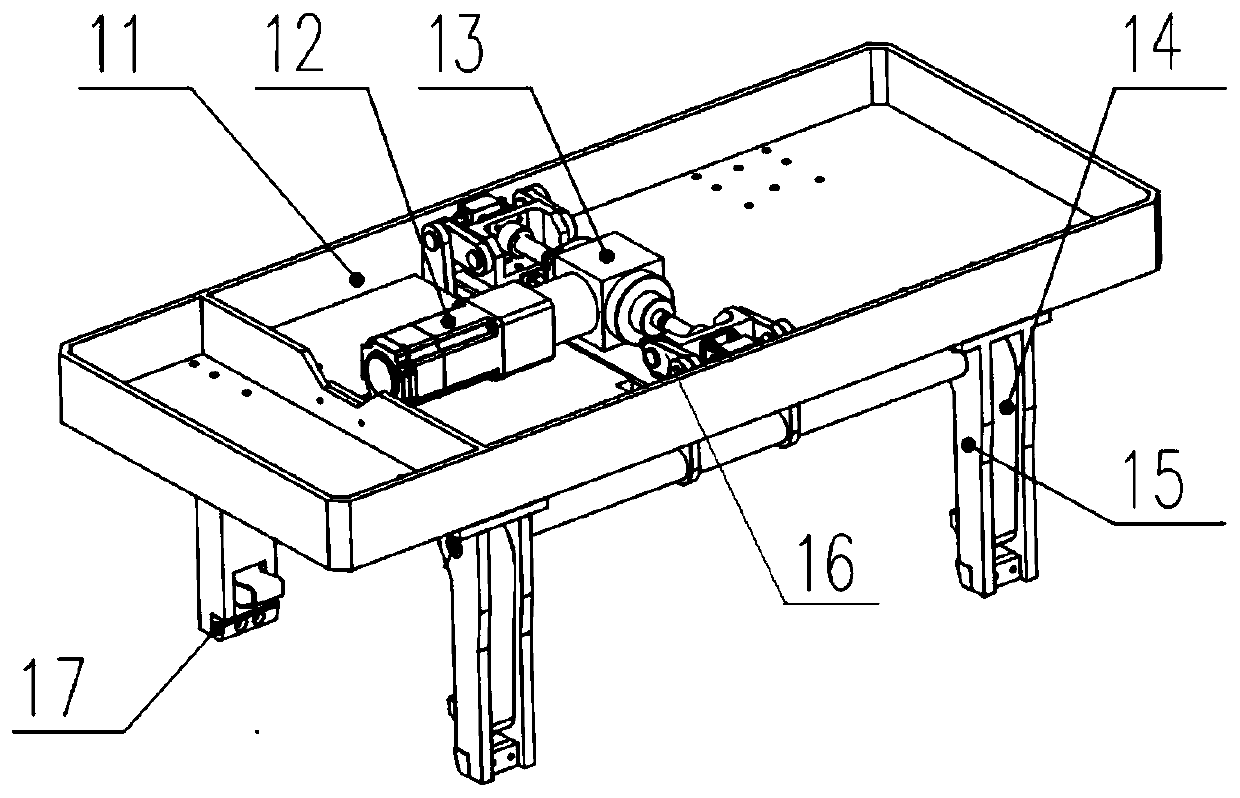
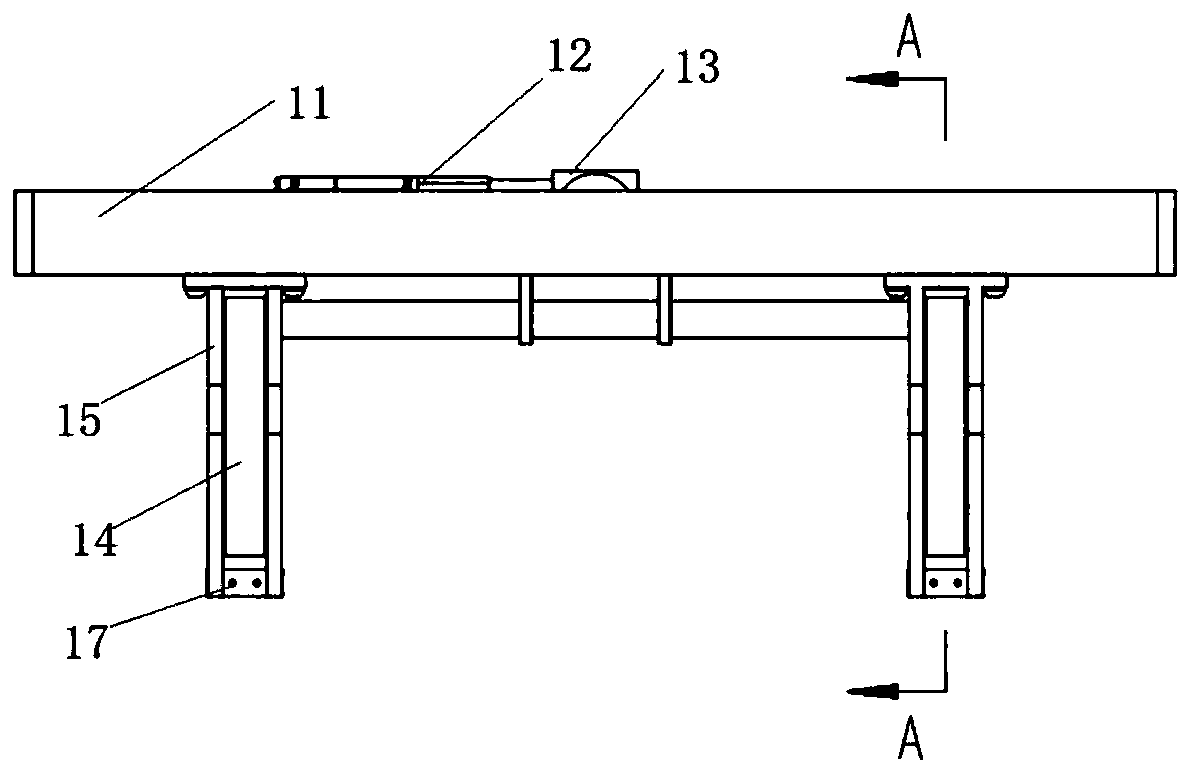
[0031] Such as figure 1 As shown, a four-claw synchronous mechanical unlocking automatic pick-and-place device includes a four-claw synchronous mechanical gripper 1 and a cargo storage box 2 . Such as figure 2 and 3 As shown, the four-claw synchronous mechanical gripper 1 includes a mounting frame 11, an input motor 12, a T-shaped double-output reducer 13, a connecting rod transmission 16, a hook claw 14, a fixed leg 15 and a wedge-shaped anti-collision block 17. Leg 15 is vertically fixed on the four corners of the bottom plate bottom of mounting frame 11 and is pressed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More