

Road edge identification method and a road edge identification system
A road edge and identification method technology, applied in the field of smart cars, can solve the problems of road edge results, such as the effect of light on the environment, and achieve the effect of improving efficiency and reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
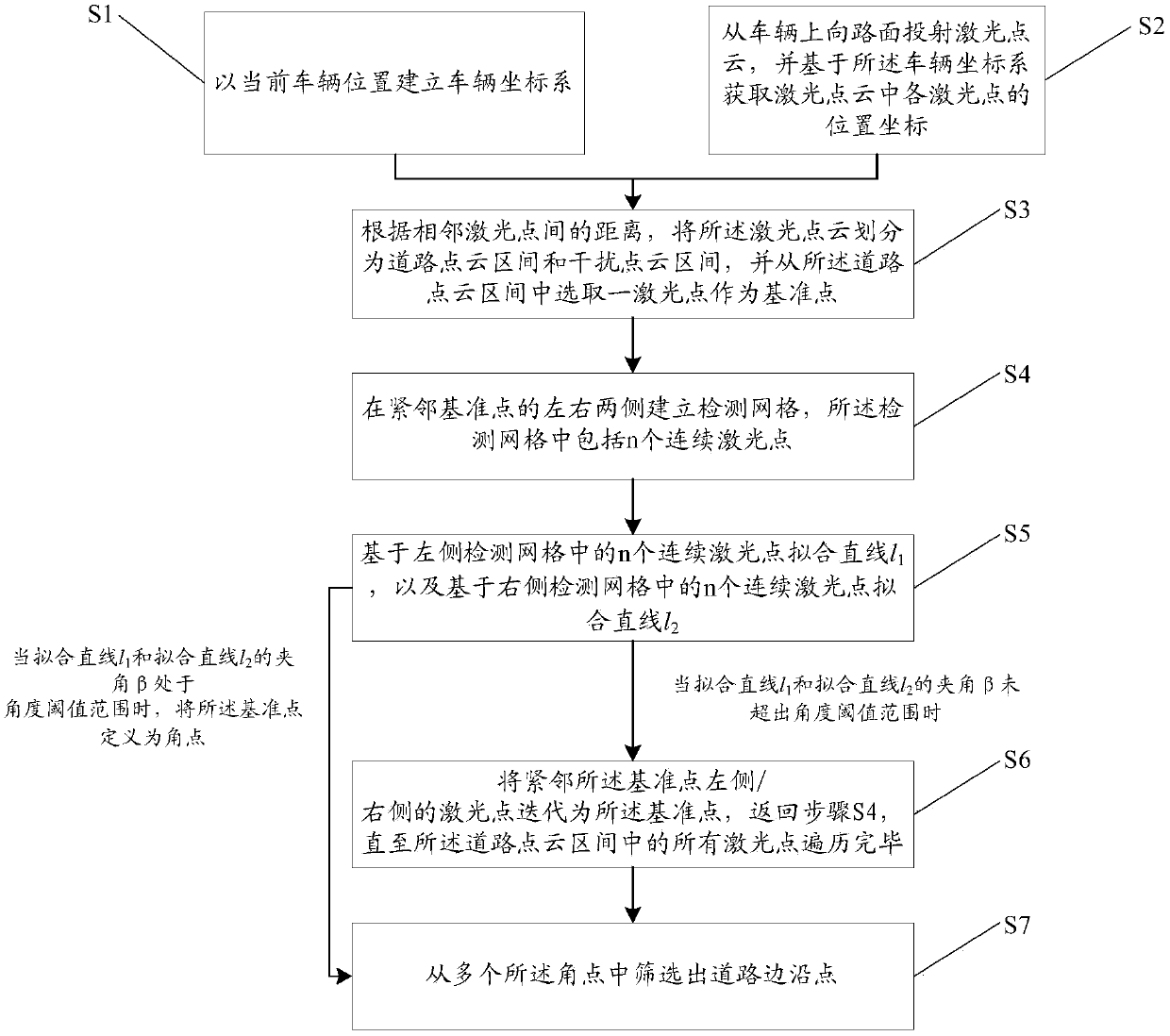
[0068] see Figure 1-6 , this embodiment provides a road edge recognition method, including:
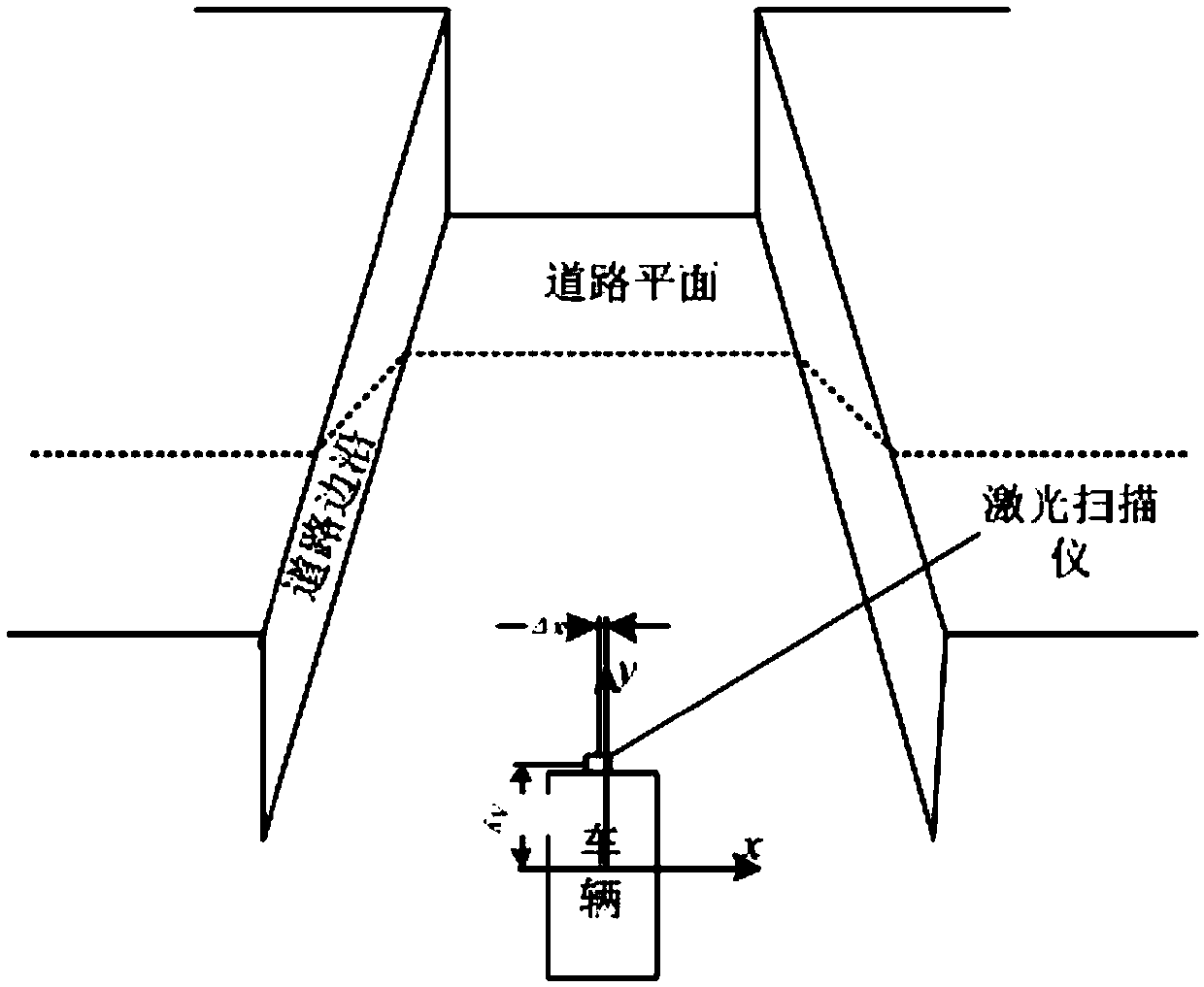
[0069] Step S1, establishing a vehicle coordinate system based on the current vehicle position;
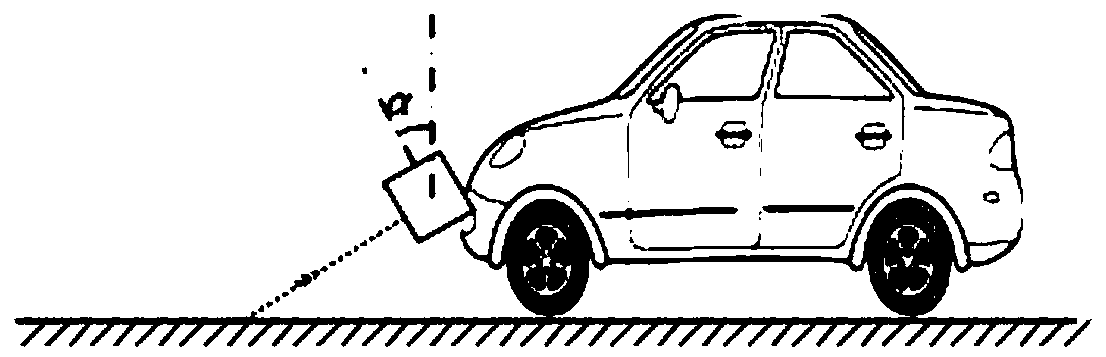
[0070] Step S2, projecting a laser point cloud from the vehicle to the road surface, and obtaining the position coordinates of each laser point in the laser point cloud based on the vehicle coordinate system;
[0071] Step S3, according to the distance between adjacent laser points, divide the laser point cloud into a road point cloud interval and an interference point cloud interval, and select a laser point from the road point cloud interval as a reference point;
[0072] Step S4, establishing a detection grid on the left and right sides adjacent to the reference point, and the detection grid includes n consecutive laser points;
[0073] Step S5, fitting a straight line l based on n consecutive laser points in the detection grid on the left 1 , and a straight line l based on n conse...
Embodiment 2
[0096] see figure 1 and Figure 7 , this embodiment provides a road edge recognition system, including a coordinate system establishment unit 1, a laser scanning device 2, a coordinate conversion unit 3, an interval division unit 4, a detection grid unit 5, a corner point judgment unit 6, and a reference point iteration unit 7 and screening output unit 8;
[0097] The coordinate system establishment unit 1 is used to establish a vehicle coordinate system with the current vehicle position;
[0098] The laser scanning device 2 is used to project a laser point cloud from the vehicle to the road surface;
[0099] The coordinate conversion unit 3 is used to obtain the position coordinates of each laser point in the laser point cloud based on the vehicle coordinate system;
[0100] The interval division unit 4 is used to divide the laser point cloud into a road point cloud interval and an interference point cloud interval according to the distance between adjacent laser points, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More