

Path planning method, device and mobile device
A path planning and algorithm technology, applied in measurement devices, image enhancement, instruments, etc., can solve the problems of low path planning efficiency and space waste, and achieve the effect of improving path planning efficiency, saving storage space, and high path planning efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are some, but not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
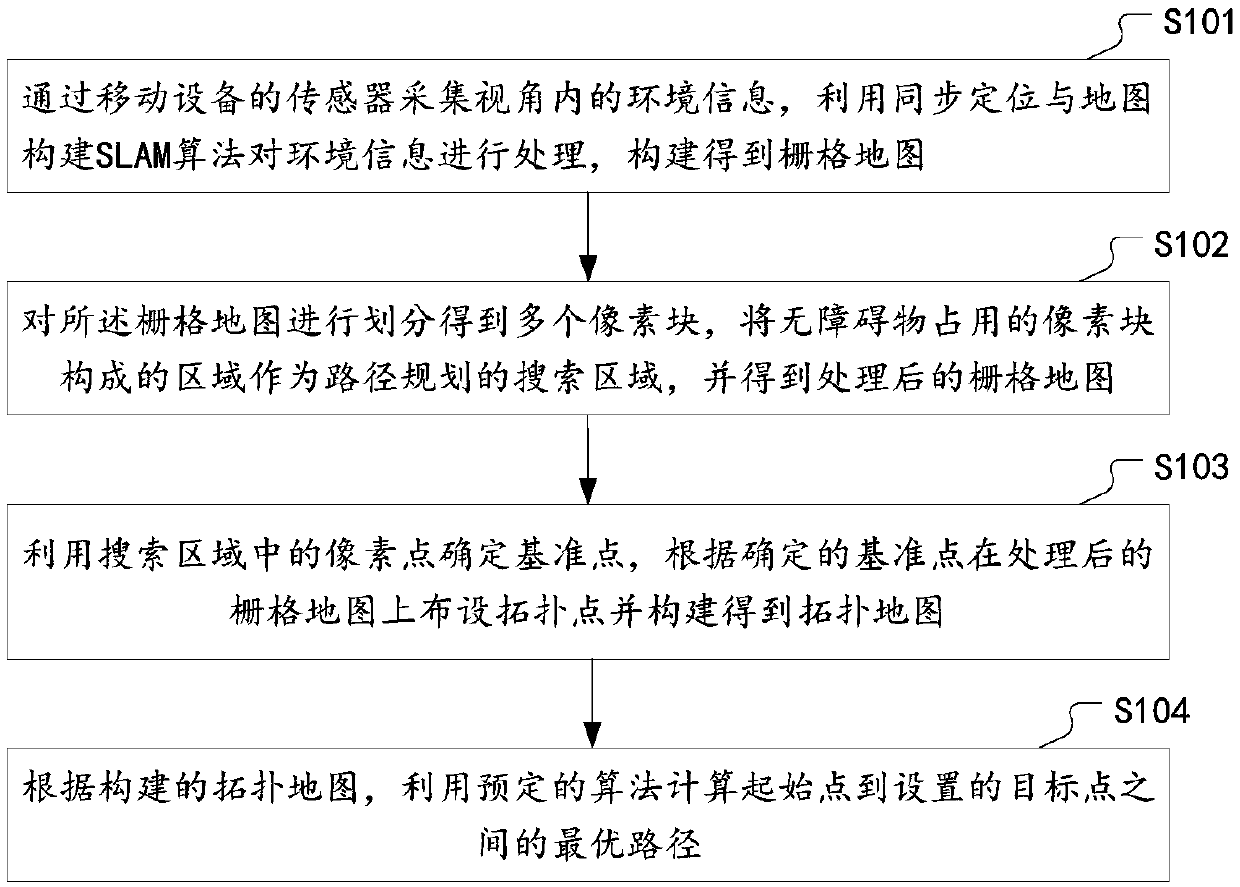
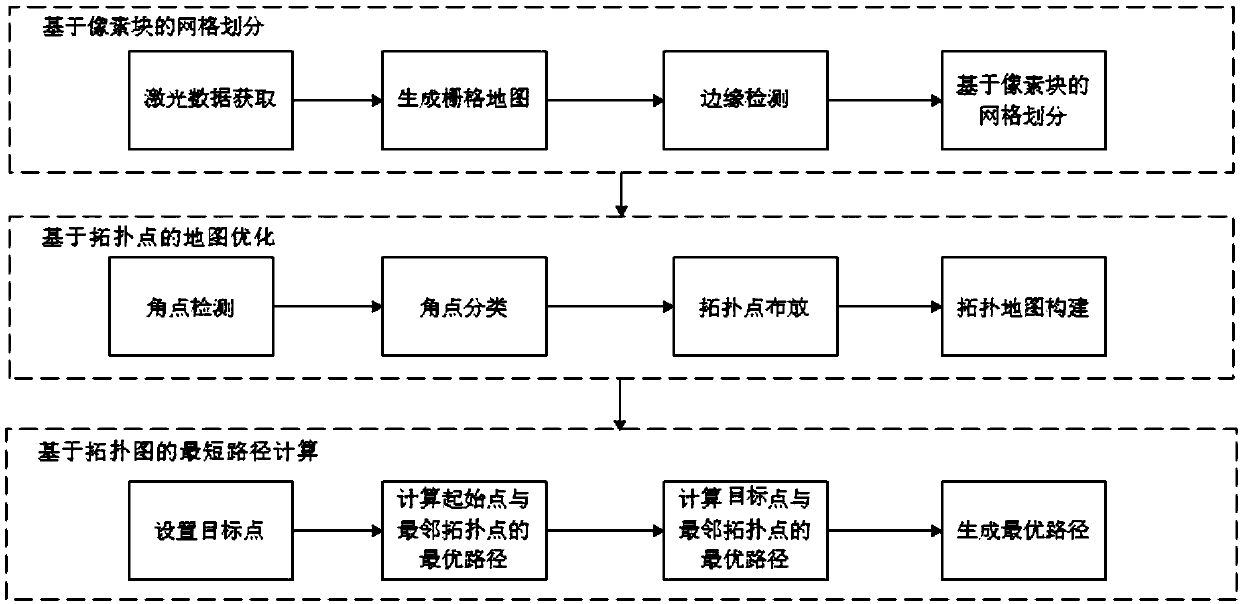
[0026] The design concept of the present invention is to propose a path planning scheme based on synchronous positioning and map construction, aiming at the problems of low planning efficiency and space waste in the path planning of the prior art, through grid division based on pixel blocks, topology-based The point map optimization and the shortest path calculation based on the topology map improve the path planning efficienc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More